图论
项目管理
广域网
编程语言
插件的定义和使用
rockchip
beautifulsoup
Exchanger
权限控制
mes
开发
docker 搭建es
加锁原理
UG NX二次开发
路径规划
复习
ofd转pdf
AVR
android课设
崩溃堆栈
PCL
2024/4/12 3:01:40
PCL - MLS代碼研讀(四)- 偏微分計算函數
PCL - MLS代碼研讀(四)- 偏微分計算函數前言getPolynomialPartialDerivative前言
本篇延續PCL - MLS代碼研讀(二),繼續介紹偏微分計算函數。
getPolynomialPartialDerivative
還記得在PCL - MLS代碼研讀(…

PCL - MLS代碼研讀(十四)- DISTINCT_CLOUD上採樣方法
PCL - MLS代碼研讀(十四)- DISTINCT_CLOUD上採樣方法
前言
在PCL - MLS代碼研讀(十一)- computeMLSPointNormal函數中已經介紹了NONE和SAMPLE_LOCAL_PLANE上採樣方法,並且在PCL - MLS代碼研讀(十三&#…
PCL - ICP代碼研讀(八 ) - transformCloud函數
PCL - ICP代碼研讀(八 ) - transformCloud函數前言transformCloud前言
如PCL - ICP代碼研讀(六 ) - IterativeClosestPoint架構中所介紹的,transformCloud函數用於對輸入點雲的XYZ坐標及法向量做剛體變換。
本篇中介…
PCL - ICP代碼研讀(十九 ) - CorrespondenceRejectorDistance實現
PCL - ICP代碼研讀(十九 ) - CorrespondenceRejectorDistance實現前言getRemainingCorrespondences函數前言
getRemainingCorrespondences函數是CorrespondenceRejector類別的核心,由CorrespondenceRejector的子類別各自實作。
它接受origi…
PCL学习之滤波算法
前言
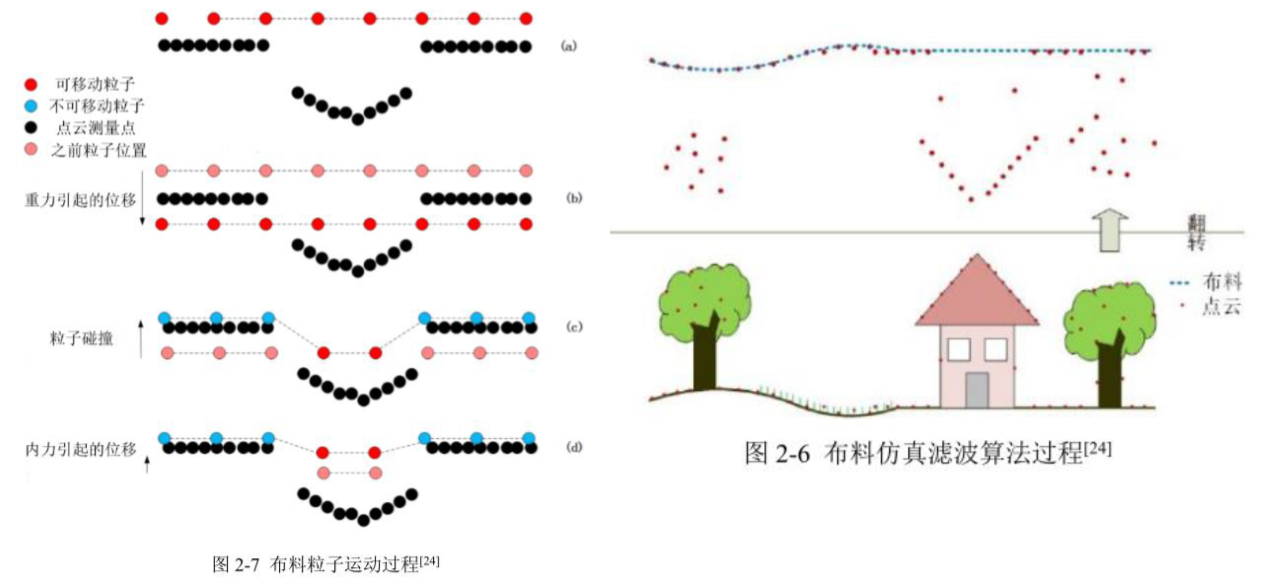
点云滤波作为常见的点云处理算法,一般是点云处理的第一步,对后续处理有很重要作用。滤波 有很多方面也有很多种功能,比如去除噪声点、离群点、点云平滑以及空洞、数据压缩等
原始点云数据往往包含大量散列点、孤立点,在获取…
PCL入门(四):octree简单使用
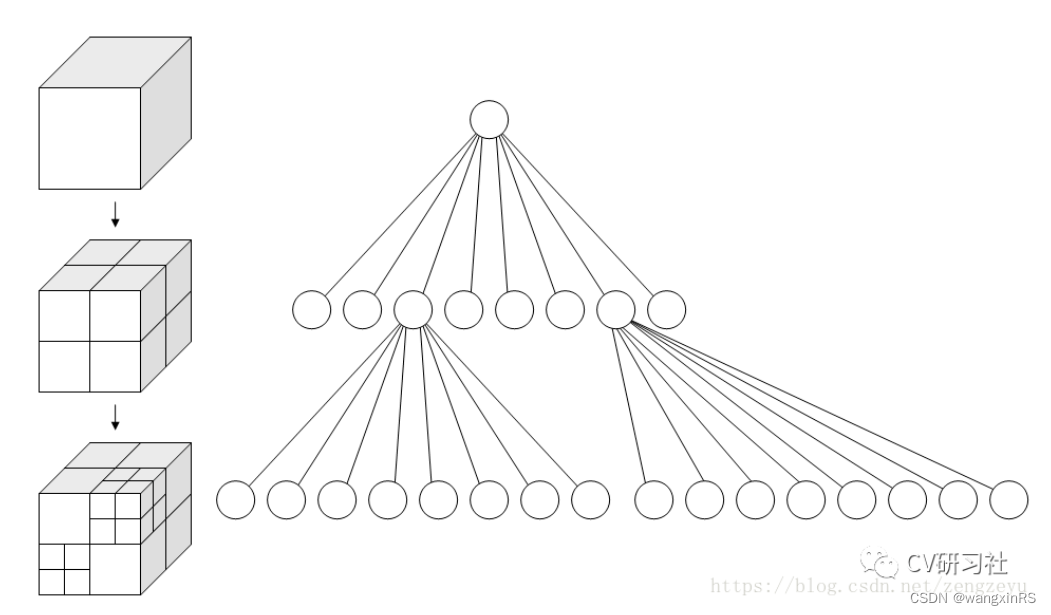
目录 1. 八叉树(Octree)2. 简单使用 参考博客《三维点云数据的两种结构Kdtree和Octree》和《八叉树》
1. 八叉树(Octree) 只需要考虑三维情况下的八叉树的情况,如下
设置最大的递归深度;找出场景的最大尺寸,并据此创建第一个立方体若未到达…
【PCL】(三)读写PCD文件
文章目录 (三)读写PCD文件写读 (三)读写PCD文件
写
首先,创建一个名为pcd_write.cpp的文件,并在其中写入以下代码:
#include <iostream>
#include <pcl/io/pcd_io.h>
#include &…

PCL - ICP代碼研讀(二 ) - Registration架構
PCL - ICP代碼研讀(二 ) - Registration架構前言usingpublic函數constructor和destructorsetter和getterregisterVisualizationCallbackgetFitnessScorehasConvergedaligngetClassNameinitCompute和initComputeReciprocalCorrespondenceRejector相關函數…
PCL - MLS代碼研讀(七)- 曲面擬合函數
PCL - MLS代碼研讀(七)- 曲面擬合函數computeMLSSurface宣告兩個變數計算鄰域內所有點的重心計算平面參數model_coefficients被投影點query_point檢查eigen_vector合理性計算局部坐標系原點計算曲率計算局部坐標系的三個軸向設定三個變數權重函數宣告四個…
PCL点云处理之Pcd文件读取、法线与曲率计算、多线程加速、属性字段合并 (二百零八)
PCL点云处理之Pcd文件读取、法线与曲率计算、多线程加速、属性字段合并(二百零八) 一、相关介绍二、算法实现1.代码一、相关介绍
(夜深人不静) 法线和曲率的计算是点云处理中常用的关键特征,PCL提供了特有的点类型PointNormal来记录这些信息,通过OMP多线程对相关的计算函…
PCL - MLS代碼研讀(五)- 曲率計算函數
PCL - MLS代碼研讀(五)- 曲率計算函數前言calculatePrincipalCurvatures參考連結前言
本篇延續PCL - MLS代碼研讀(二),繼續介紹曲率計算函數。
calculatePrincipalCurvatures
Eigen::Vector2f
pcl::MLSResult::calc…
PCL - ICP代碼研讀(二三 ) - ConvergenceCriteria架構
PCL - ICP代碼研讀(二三 ) - ConvergenceCriteria架構前言ConvergenceCriteriausingconstructor和destructor收斂判斷函數前言
ConvergenceCriteria是一個抽象類別,提供了hasConverged介面,用於判斷當前點雲校正算法是否收斂。
…
PCL - MLS代碼研讀(三)- 坐標計算函數
PCL - MLS代碼研讀(三)- 坐標計算函數前言三維getMLSCoordinates二維getMLSCoordinatesgetPolynomialValue前言
本篇延續PCL - MLS代碼研讀(二),繼續介紹坐標計算函數。
三維getMLSCoordinates
此函數計算全局坐標系…
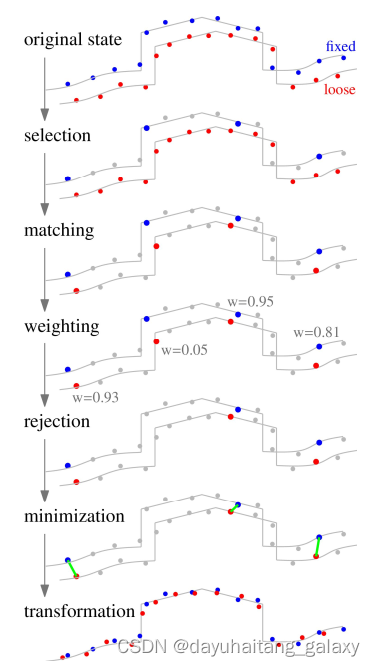
PCL - ICP代碼研讀(一) - 整體架構
PCL - ICP代碼研讀(一) - 整體架構如ICP(Iterative Closest Point)算法推導中描述的ICP算法,可以分為以下三步:
尋找兩點雲間的配對估計轉換矩陣判斷收斂與否
在PCL這個庫中,整個校正過程所涉…
PCL - MLS代碼研讀(八)- MovingLeastSquares
PCL - MLS代碼研讀(八)- MovingLeastSquares前言pcl::MovingLeastSquaresUpsamplingMethodMLSVoxelGridtypedefusingprotected成員變量public成員函數constructor和destructorgetter和setterprocessprotected成員函數private成員前言
本篇介紹MLS的第二…
PCL - ICP代碼研讀(十八 ) - DataContainerInterface和DataContainer
PCL - ICP代碼研讀(十八 ) - DataContainerInterface和DataContainer前言DataContainerInterfaceusingdestructor計算配對分數的介面DataContainerusingconstructor和destructor點雲的setter和gettertarget點雲搜索方法setter法向量setter和getter配對分…
PCL - ICP代碼研讀(十一 ) - Correspondence實現
PCL - ICP代碼研讀(十一 ) - Correspondence實現前言getRejectedQueryIndices<< 運算子前言
接續PCL - ICP代碼研讀(十 ) - Correspondence架構,本篇繼續來看Correspondence各函數的實現,本片對應到…
PCL - MLS代碼研讀(十一)- computeMLSPointNormal函數
PCL - MLS代碼研讀(十一)- computeMLSPointNormal函數前言computeMLSPointNormal前言
在PCL - MLS代碼研讀(十)- performProcessing函數中,看到了performProcessing函數調用computeMLSPointNormal函數做計算ÿ…
PCL - PCLBase代碼研讀(二)- PCLBase實現
PCL - PCLBase代碼研讀(二)- PCLBase實現
前言
接續PCL - PCLBase代碼研讀(一)- PCLBase架構,這邊繼續來看PCLBase成員函數的實現。本篇主要關注的是common/include/pcl/impl/pcl_base.hpp這份文件。
constructor &…
PCL - ICP代碼研讀(十二 ) - CorrespondenceEstimationBase架構
PCL - ICP代碼研讀(十二 ) - CorrespondenceEstimationBase架構前言CorrespondenceEstimationBaseusingconstructor和destructor點雲的setter和getter法向量相關函數索引的setter和getter最近鄰查找相關函數估計點對的函數point_representation_的setter…
《点云算法处理目录》
点云算法处理目录 一、PCL多线程处理二、焊接点云处理三、基本几何处理四、其他 一、PCL多线程处理
IO加速-STL网格文件
滤波加速-半径滤波
配准加速-ICP
二、焊接点云处理
角焊缝处理
V型焊缝处理
三、基本几何处理
空间两平面相交
空间两直线相交
四、其他
LAS转换…
VS中PCL库附加依赖项配置
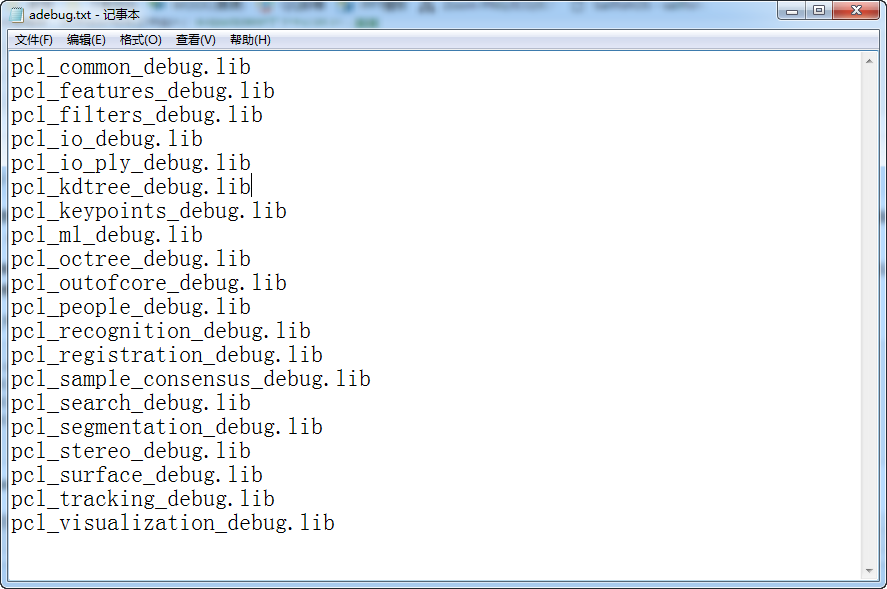
在VS中使用PCL库通常要经过一些配置,参考https://www.cnblogs.com/blog-vincent-0x1F7/p/9507631.html教程中第一部分PCL安装及在VS2013中使用PCL。
其中包含目录和库目录的设置都简单,根据自己安装目录的差别略有不同;但是附加依赖项则较为…
PCL - MLS代碼研讀(一)- MLS測試
PCL - MLS代碼研讀(一)- MLS測試前言測試曲面重建測試SAMPLE_LOCAL_PLANE上採樣方法測試VOXEL_GRID_DILATION上採樣方法主程序MLS module結構前言
PCL的MLS模塊用於對點雲做平滑處理(或說曲面重建)及上採樣,其中MLS的…

3D测量之圆孔测量 拟合圆 点云变换
0. 效果展示 1. 圆孔测量介绍
此文中的圆孔测量是一项3D视觉技术,旨在精确测量物体表面上的圆孔的直径和中心坐标。通过使用高精度3D相机(线激光轮廓仪或结构体等)采集原始点云数据,通过3D视觉算法能够快速、准确地分析物体上的圆孔特征,为制造和工程领域提供了强大的测量…

python中安装使用pcl
这个参考官网的方法即可。我是安装完了使用pcl的时候总是提示找不到pcl module,使用的是官网以下方法: (在conda prompt中分别执行以上命令)
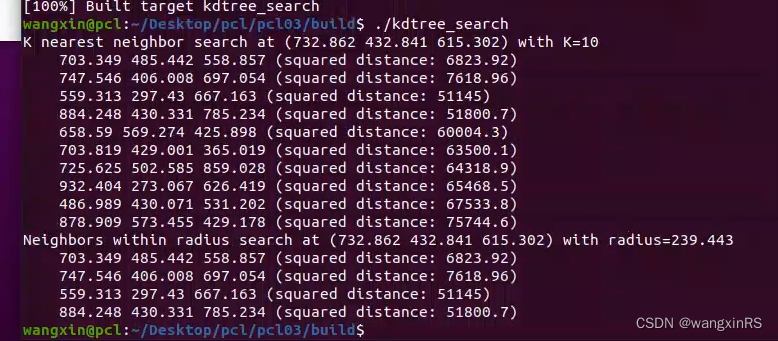
PCL代码学习03-kdtree_search
PCL代码学习03-kdtree_search
/** Description: https://www.cnblogs.com/li-yao7758258/p/6437440.html* Author: HCQ* Company(School): UCAS* Email: 1756260160qq.com* Date: 2020-10-08 21:46:40* LastEditTime: 2020-10-27 16:03:16* FilePath: /pcl-learning/02kdtree/…
PCL - ICP代碼研讀(四 ) - getFitnessScore函數
PCL - ICP代碼研讀(四 ) - getFitnessScore函數前言getFitnessScore - for two vectorsgetFitnessScore - for two point clouds前言
接續PCL - ICP代碼研讀(三 ) - Registration初始化,本篇主要介紹Registration類別…
PCL - ICP代碼研讀(十 ) - Correspondence架構
PCL - ICP代碼研讀(十 ) - Correspondence架構前言Correspondence前言
Correspondence結構體表示兩點雲間的一組配對,它的架構主要寫在correspondence.h中。
Correspondence
必要的include:
#pragma once#ifdef __GNUC__
#pra…

PCL - MLS代碼研讀(十五)- VOXEL_GRID_DILATION上採樣方法
PCL - MLS代碼研讀(十五)- VOXEL_GRID_DILATION上採樣方法前言成員變數MLSVoxelGridMLSVoxelGrid建構子dilate函數getter & setterprocess函數performUpsampling函數上採樣結果前言
PCL - MLS代碼研讀(十一)- computeMLSPoin…
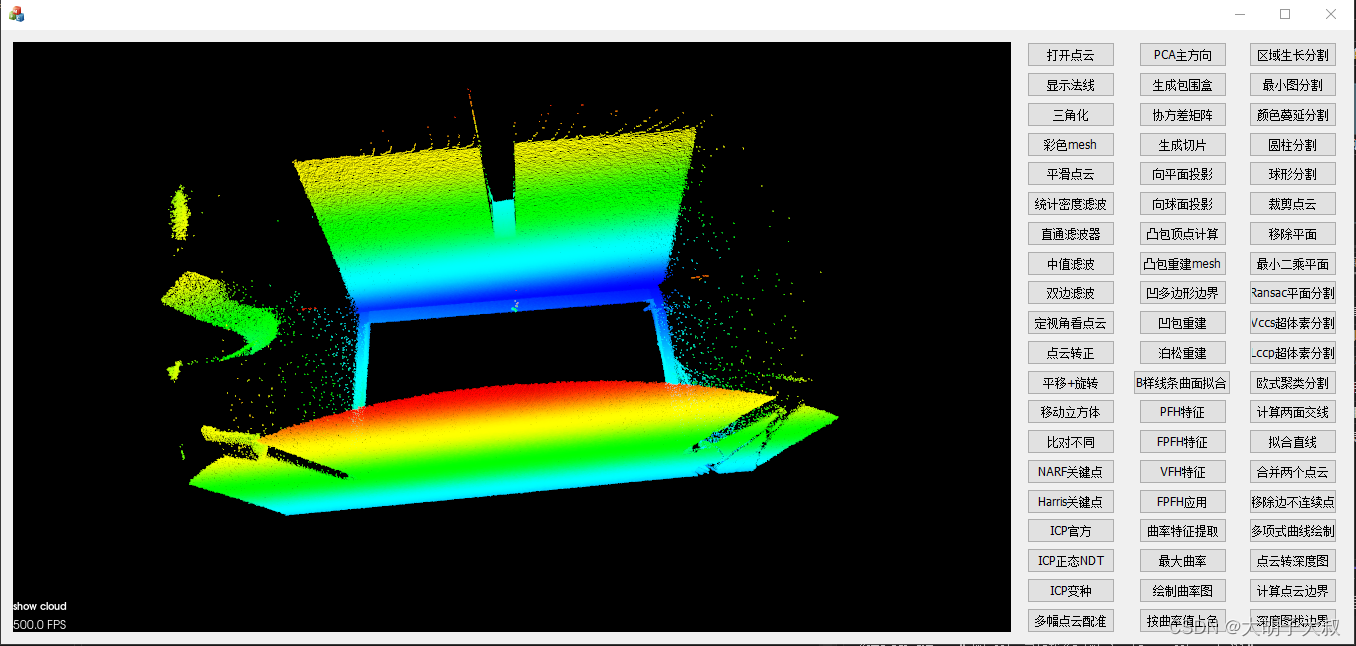
pcl经典算法60例——(1)打开并显示点云
一、搭建MFC框架
1、环境说明
本教程为vs2022,pcl1.12.1版本,其他版本自己进行适当修改,仅供参考。
2、方法步骤
(1)新建项目,选择“基于对话框”,然后点击“下一步” 二、配置pcl环境
关于配置环境,网…
PCL - ICP代碼研讀(二五 ) - DefaultConvergenceCriteria實現
PCL - ICP代碼研讀(二五 ) - DefaultConvergenceCriteria實現前言DefaultConvergenceCriteria前言
接續PCL - ICP代碼研讀(二四 ) - DefaultConvergenceCriteria架構,本篇繼續介紹DefaultConvergenceCriteria中hasCon…
PCL - ICP代碼研讀(五 ) - align函數
PCL - ICP代碼研讀(五 ) - align函數前言alignalign wrapper前言
接續PCL - ICP代碼研讀(二 ) - Registration架構,本篇主要介紹Registration類別的align函數。
computeTransformation這個純虛擬函數用於估計兩點雲間…
.template cast<>中template的作用
.template cast<>中template的作用PCL中的surface/include/pcl/surface/impl/mls.hpp裡有這麼一段代碼:
query_point cloud[index].getVector3fMap ().template cast<double> ();第一次看到.template cast<>這種寫法一定覺得不明所以࿰…
PCL - ICP代碼研讀(二一 ) - TransformationEstimationSVD架構
PCL - ICP代碼研讀(二一 ) - TransformationEstimationSVD架構前言TransformationEstimationSVDusingconstructor和destructor估計剛體變換的函數getTransformationFromCorrelationprotected成員變數前言
TransformationEstimationSVD是TransformationE…

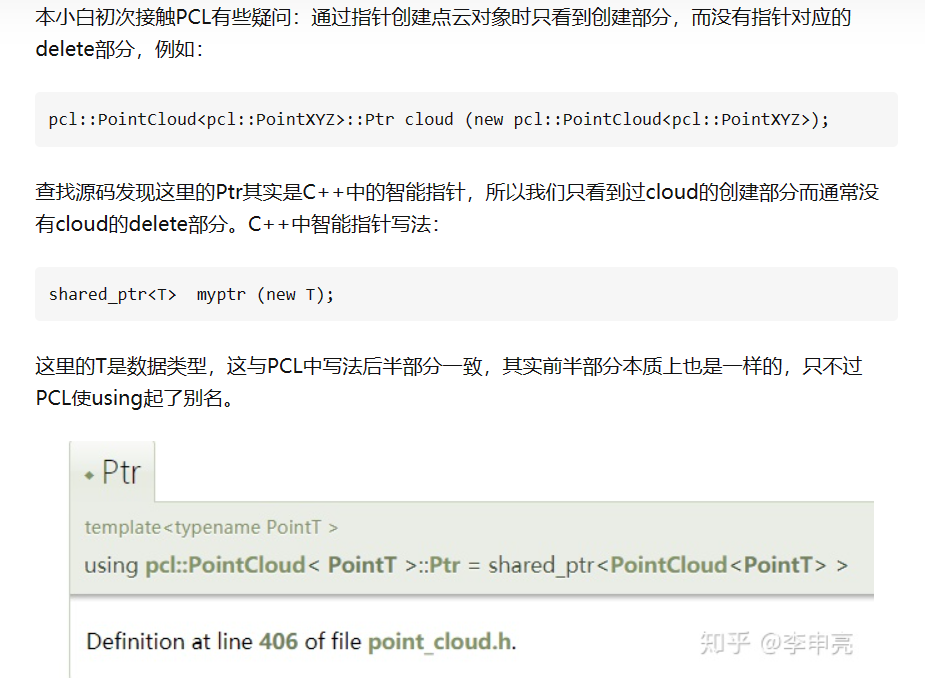
PCL点云库点云指针类型转化
使用点云库时候报错:
原因在于pcl::PointCloud::Ptr类型为boost::shared_ptr,所以需要将返回值也变为boost::shared_ptr才可以赋值. cloud_sampled seg_objs[18].obj_cloud.makeShared()需要调用一个makeShared 的标准库函数来处理
PCL - ICP代碼研讀(二四 ) - DefaultConvergenceCriteria架構
PCL - ICP代碼研讀(二四 ) - DefaultConvergenceCriteria架構前言DefaultConvergenceCriteriausing收斂狀態constructor和destructorgetter和settercalculateMSEprotected成員變數前言
DefaultConvergenceCriteria顧名思義,也就是預設的收斂…
PCL - ICP代碼研讀(九 ) - computeTransform函數
PCL - ICP代碼研讀(九 ) - computeTransform函數前言computeTransform前言
computeTransform函數實現了ICP算法,是icp.hpp的精髓所在。
回顧ICP(Iterative Closest Point)算法推導中提到的ICP算法三步驟,…
PCL - ICP代碼研讀(二十 ) - TransformationEstimation剛體變換估計
PCL - ICP代碼研讀(二十 ) - TransformationEstimation剛體變換估計前言TransformationEstimationusingconstructor和destructor估計剛體變換的函數前言
TransformationEstimation是一個抽象類別,提供了多個用於估計剛體變換的介面。
本篇對…

3D视觉测量:3D空间圆拟合优化
文章目录 0. 测试效果1. 测量思路2. 部分调用代码文章目录:形位公差测量关键内容:通过视觉方法实现GD&T中的圆孔位置定位0. 测试效果 1. 测量思路 空间圆拟合是指在三维空间中找到最佳拟合圆的过程。这通常用于从一组三维点数据中找到一个圆,以最小化数据点到圆的距离之…
PCL 计算一条直线与一条线段的距离
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 这里的线段我们仍然使用一种参数化的表示,即 Q [ 0 ] + s [ 0 ] ∗ ( Q [ 1 ] − Q [ 0
PCL - MLS代碼研讀(二)- MLSResult
PCL - MLS代碼研讀(二)- MLSResult前言pcl::MLSResultProjectionMethodPolynomialPartialDerivativeMLSProjectionResults成員變量computeMLSWeight成員函數兩個constructor坐標計算函數偏微分計算函數曲率計算函數各式投影函數擬合曲面計算函數前言
PC…

PCL 判断两条线段的平行性(三维空间)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 这里使用一种比较有趣的方式来判断三维空间中两条线段的平行性,我们都知道两条线段所代表的矢量进行叉乘计算所得数值,代表了由这两条线段组成的平行四边形的面积值,如下图所示: ok,那么如果将此结论推广到三维…
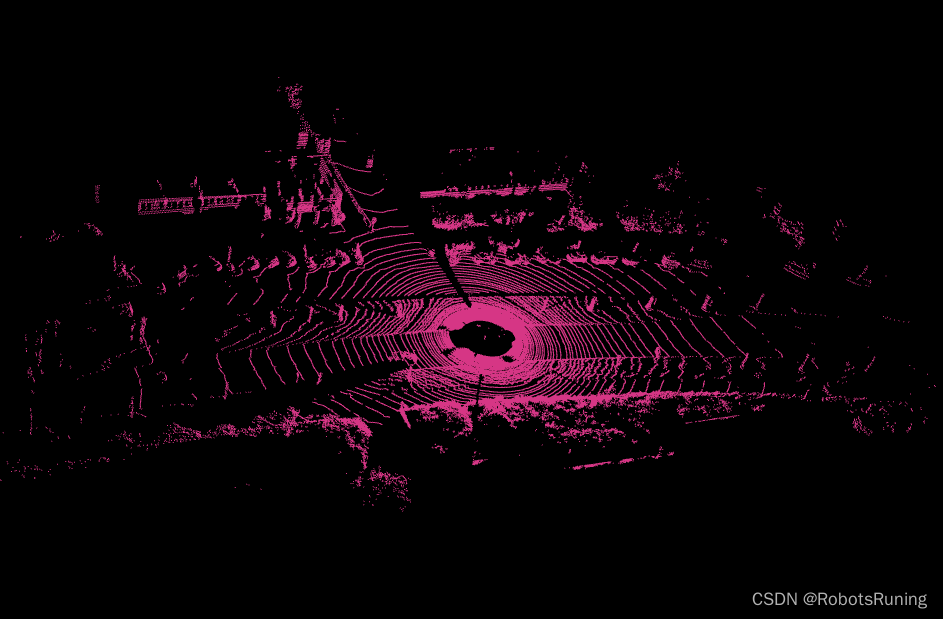
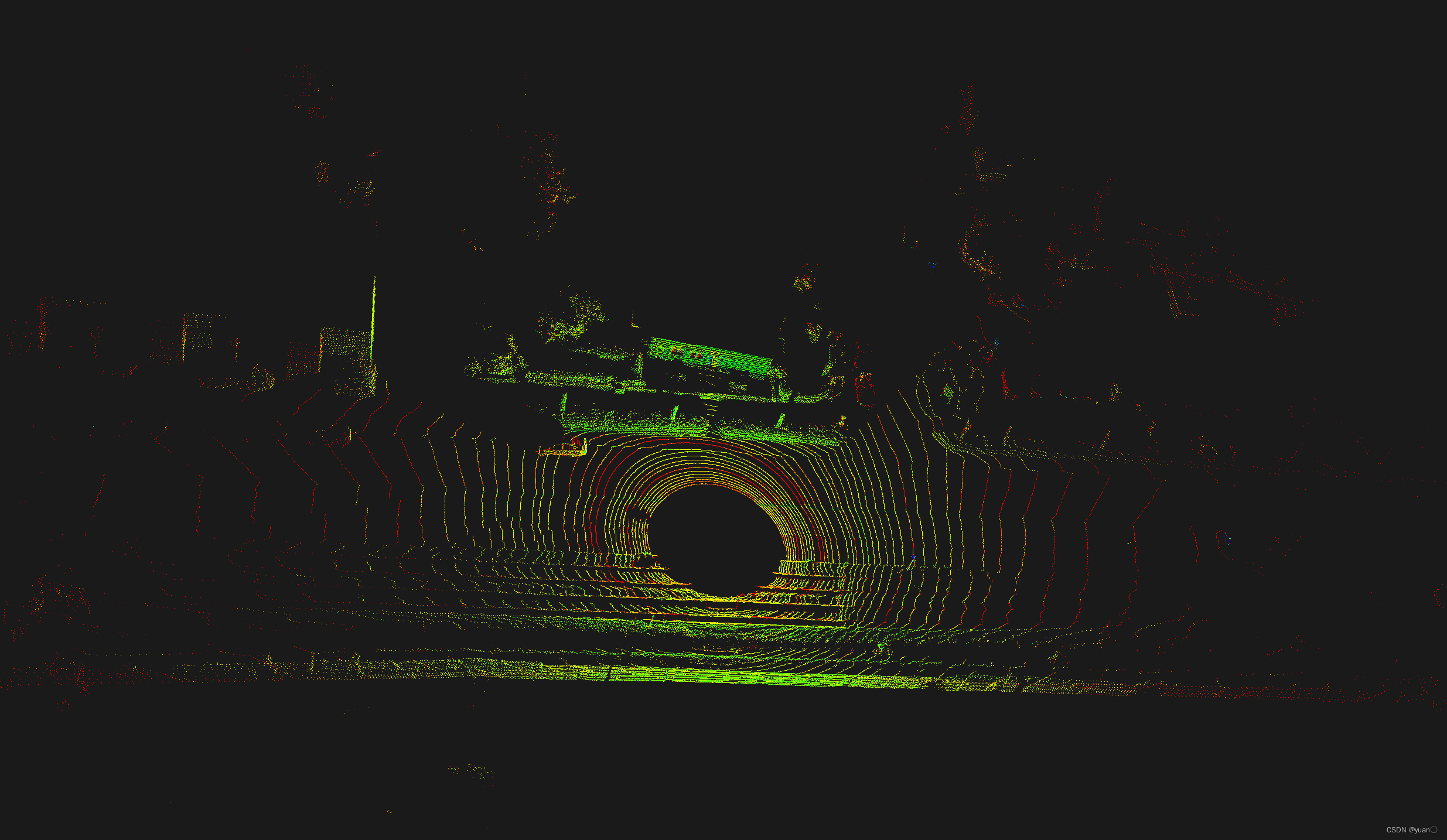
KITTI数据集中的二进制激光雷达数据(.bin文件)转换为点云数据(.pcd文件)(C++代码)
目录
main.cpp
CMakeLists.txt main.cpp
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <fstream>
#include <iostream>
#include <vector>int main() {// Define file pathsstd::string input_filename "/home/f…
C++ PCL点云dscan密度分割三维
程序示例精选 C PCL点云dscan密度分割三维 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言
这篇博客针对《C PCL点云dscan密度分割三维》编写代码,代码整洁,规则,易读。…
PCL - MLS代碼研讀(十)- performProcessing函數
PCL - MLS代碼研讀(十)- performProcessing函數前言performProcessing前言
在PCL - MLS代碼研讀(九)- MLS入口 - process函數中,看到了process函數實際上是performProcessing函數的wrapper,真正做事的其實…

3D点云处理:点云形态学腐蚀运算
文章目录 0. 测试效果1. 基本内容1.1 2D方法对点云进行腐蚀运算1.2 3D方法对点云进行腐蚀运算文章目录:3D视觉个人学习目录微信:dhlddxB站: Non-Stop_目标:去除点云的边缘噪声等;0. 测试效果 红色为腐蚀后的点云;白色为原始点云; 1. 基本内容 点云腐蚀是一种用于处理三维…

PCL MLS論文Computing and Rendering Point Set Surfaces研讀筆記
PCL MLS論文Computing and Rendering Point Set Surfaces研讀筆記前言定義曲面 - 投影投影步驟尋找點<span class"katex--inline">r</span>的擬合平面(或說座標系)<span class"katex--inline">H</span>尋找由<span class"…
PCL - ICP代碼研讀(六 ) - IterativeClosestPoint架構
PCL - ICP代碼研讀(六 ) - IterativeClosestPoint架構前言usingpublic成員函數constructor和destructorcopy constructordestructorgetConvergeCriteriasetInputSourcesetInputTargetuse_reciprocal_correspondence_的setter和getterprotected成員函數pr…
PCL - ICP代碼研讀(三 ) - Registration初始化
PCL - ICP代碼研讀(三 ) - Registration初始化前言setInputSourcesetInputTargetinitComputeinitComputeReciprocal前言
接續PCL - ICP代碼研讀(二 ) - Registration架構,這邊繼續來看Registration成員函數的實現。本…
PCL - ICP代碼研讀(十三 ) - CorrespondenceEstimationBase實現
PCL - ICP代碼研讀(十三 ) - CorrespondenceEstimationBase實現前言CorrespondenceEstimationBasesetInputTarget函數initCompute函數initComputeReciprocal函數前言
從PCL - ICP代碼研讀(十二 ) - CorrespondenceEstimationBase…
PCL - ICP代碼研讀(二六) - TransformationEstimationPointToPlaneLLS架構
PCL - ICP代碼研讀(二六) - TransformationEstimationPointToPlaneLLS架構前言TransformationEstimationPointToPlaneLLSusingconstructor和destructor估計剛體變換的函數constructTransformationMatrix前言
ICP的變種Point-To-Plane相較於經典款的ICP&…
PCL - ICP代碼研讀(十五 ) - CorrespondenceEstimation實現
PCL - ICP代碼研讀(十五 ) - CorrespondenceEstimation實現前言CorrespondenceEstimationdetermineCorrespondences函數determineReciprocalCorrespondences函數前言
接續PCL - ICP代碼研讀(十四 ) - CorrespondenceEstimation架…
PCL - ICP代碼研讀(七 ) - determineRequiredBlobData函數
PCL - ICP代碼研讀(七 ) - determineRequiredBlobData函數前言determineRequiredBlobData前言
在computeTransformation函數中有這麼一段代碼: // Make blobs if necessary// ?determineRequiredBlobData();PCLPointCloud2::Ptr target_blo…
PCL - MLS代碼研讀(九)- MLS入口 - process函數
PCL - MLS代碼研讀(九)- MLS入口 - process函數
前言
在PCL - MLS代碼研讀(一)中,我們看到了MLS模塊的入口函數是process,這也是本篇要介紹的內容。
process
process為入口函數,做完一些檢查及必要的初…
PCL - ICP代碼研讀(十七 ) - CorrespondenceRejectorDistance架構
PCL - ICP代碼研讀(十七 ) - CorrespondenceRejectorDistance架構前言CorrespondenceRejectorDistanceusingconstructor和destructorgetRemainingCorrespondences最大距離的getter和setter點雲,法向量設定相關函數target點雲搜索方法setterap…
PCL - MLS代碼研讀(十二)- addProjectedPointNormal及copyMissingFields函數
PCL - MLS代碼研讀(十二)- addProjectedPointNormal及copyMissingFields函數前言addProjectedPointNormalcopyMissingFields前言
在PCL - MLS代碼研讀(十)- performProcessing函數和PCL - MLS代碼研讀(十一࿰…
PCL 判断三点共线(三维空间)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 继续之前的思路PCL 判断两条线段的平行性(三维空间),我们可以把判断三点共线看做是判断两条线段是否具有平行性,且这两条线段共用其中一个端点,基于此当这两条线段平行时,则证明这三点共线。 二、实现代码
/…

3D视觉测量:面对面的对称度 点对(附源码)
文章目录 0. 测试效果1. 基本内容2. 3D视觉测量对称度测量思路3. 代码实现4. 参考文章目录:3D视觉测量目录微信:dhlddxB站: Non-Stop_目标:通过3D视觉方法计算面对面的对称度0. 测试效果 数据说明:此测试点云是通过UG建模,Meshlab降采样得到,数据比较理想,仅作为测试使用…

PCL系列——pcl库概览(未完待续)
概述
12个模块
1 Filters滤波
由于测量误差,数据有阴影点,通过分析每个点周围的邻近点的统计分析,修剪那些不符合某些标准的,通过计算邻近点平均距离,假设它们符合高斯分布,其平均距离在由全局距离平均…
4 如何依次对准多个点云图像(未完待续)
参考:How to incrementally register pairs of clouds
1 原理
2 代码解析
3 最终代码
/*
* Software License Agreement (BSD License)
*
* Copyright (c) 2010, Willow Garage, Inc.
* All rights reserved.
*
* Redistribution and use in source and binary forms, w…
点云处理---最小矩形包围盒
包围体是一个简单的几何空间,里面包含着复杂形状的物体。为物体添加包围体的目的是快速的进行碰撞检测或者进行精确的碰撞检测之前进行过滤(即当包围体碰撞,才进行精确碰撞检测和处理)。包围体类型包括球体、轴对齐包围盒…
PCL代码学习02-matrix_transform
PCL代码学习02-matrix_transform
#include <iostream>#include <pcl/io/pcd_io.h>
#include <pcl/io/ply_io.h>
#include <pcl/point_cloud.h>
#include <pcl/console/parse.h>
#include <pcl/common/transforms.h> // 点云坐标变换
#inc…

PCL - MLS代碼研讀(十三)- RANDOM_UNIFORM_DENSITY上採樣方法
PCL - MLS代碼研讀(十三)- RANDOM_UNIFORM_DENSITY上採樣方法
前言
在PCL - MLS代碼研讀(十一)- computeMLSPointNormal函數中已經介紹了NONE和SAMPLE_LOCAL_PLANE上採樣方法。本篇主要介紹之前略過的RANDOM_UNIFORM_DENSITY上採…
PCL代码学习01-pcd_write
PCL代码学习01-pcd_write pcd_write.cpp #include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>int main(int argc, char **argv)
{pcl::PointCloud<pcl::PointXYZ> cloud;// Fill in the cloud datacloud.width 5;cloud.hei…

PCL 获得两片空间对齐点云的差距
说明:
本篇博客的目的是利用PCL中class pcl::SegmentDifferences< PointT >类来获得两片空间对齐点云的差异,可以用来分割出空间中突然多出来的某些点云。 所用的配置 VS2015PCL1.8.1kinectV2
代码如下:
#include <iostream>
…

Ubuntu20.04纯命令配置PCL(点云库)
Ubuntu20.04纯命令配置PCL(点云库)
最近在学习点云库(PCL)的使用,第一步就是在自己的电脑安装配置PCL。 首先,对于ubuntu 16.04以上版本,可以直接使用命令进行安装,新建好一个文件夹…
《点云处理算法》——GROR配准
GROR配准方法(实时性挺好) 一、 效果展示二、VS运行2.1 github源码下载2.2 编译运行 三、后续集成 一、 效果展示 二、VS运行
最近和小伙伴交流,他发现一个好用的配准方法,放在这里实现一下
2.1 github源码下载
gror
2.2 编译…

【编程实践】使用pcl提取给定点云的三维边界点
1 执行结果
原始点云可视化 搜索半径设置为0.1m 搜索半径设置为0.05m
2 代码实现
// boundary#include <pcl/point_types.h>
#include <pcl/features/normal_3d.h>
#include <pcl/features/boundary.h>
#include <pcl/io/file_io.h>
#include &l…
项目实践:类平面抓取点计算 位姿估计
文章目录 1. 基本内容2. 类平面抓取位姿估计方案2.1 总体方案2.2 步骤描述(部分代码实现)3. 总体调用代码4. 测试效果文章目录:3D视觉个人学习目录微信:dhlddxB站: Non-Stop_本文作为一个小型项目的解决方案,基本涵盖了类平面位姿估计的“点云预处理”和“位姿估计”内容;Q…
3D视觉测量:计算两个平面之间的夹角(附源码)
文章目录 1. 基本内容2. 代码实现文章目录:形位公差测量关键内容:通过视觉方法实现平面之间夹角的计算1. 基本内容 要计算两个平面之间的夹角,首先需要知道这两个平面的法向量。假设有两个平面,它们的法向量分别为 N 1 和 N 2 N_1 和 N_2

vs2019配置pcl1.10.0+点云可视化示例
目录1、准备2、开始配置1、安装pcl2、环境变量3、配置项目属性1、打开vs2019,新建一个win32控制台应用程序2、配置管理器3、属性管理器4、解决方案3、代码检验是否配置成功参考及感谢:完1、准备
1、vs2019安装可参考: https://blog.csdn.net…


点云格式-PCD格式介绍
PCD格式介绍 一、概述二、PCD 版本三、文件格式头信息四、数据存储格式类型五、优于其他文件格式的优点六、例子 一、概述 PCD文件格式是PCL库最常用的一种数据格式、也是其提供的一个独有的数据格式,PCD文件格式并不是要重新发明轮子,而是为了补充现有的…
Windows10安装PCL1.14.0及点云配准
一、下载visual studio2022
下载网址:Visual Studio: 面向软件开发人员和 Teams 的 IDE 和代码编辑器 (microsoft.com) 安装的时候选择"使用C的桌面开发“,同时可以修改文件路径,可以放在D盘。修改文件路径的时候,共享组件、…
Windows环境下pcl点云库 安装配置教程
本文为Windows配置点云库pcl步骤,具体win10、visual studio 2019、pcl1.11.1。
【1】下载安装包
Releases PointCloudLibrary/pcl GitHub 其中,AllInOne是一个包含了PCL库所有模块的单独下载包,方便快速获取整个PCL库,而pdb则…
PCL 垂直分散指数计算
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 这里实现一种基于点的局部垂直分散指数计算,该指数对于一些城市场景较为适用,可以有效的提取出城市中的植被点云。 城市场景通常可以分解为一组不同高度的二维区域,虽然这些高度通常是分段恒定或分段线性的,但在…
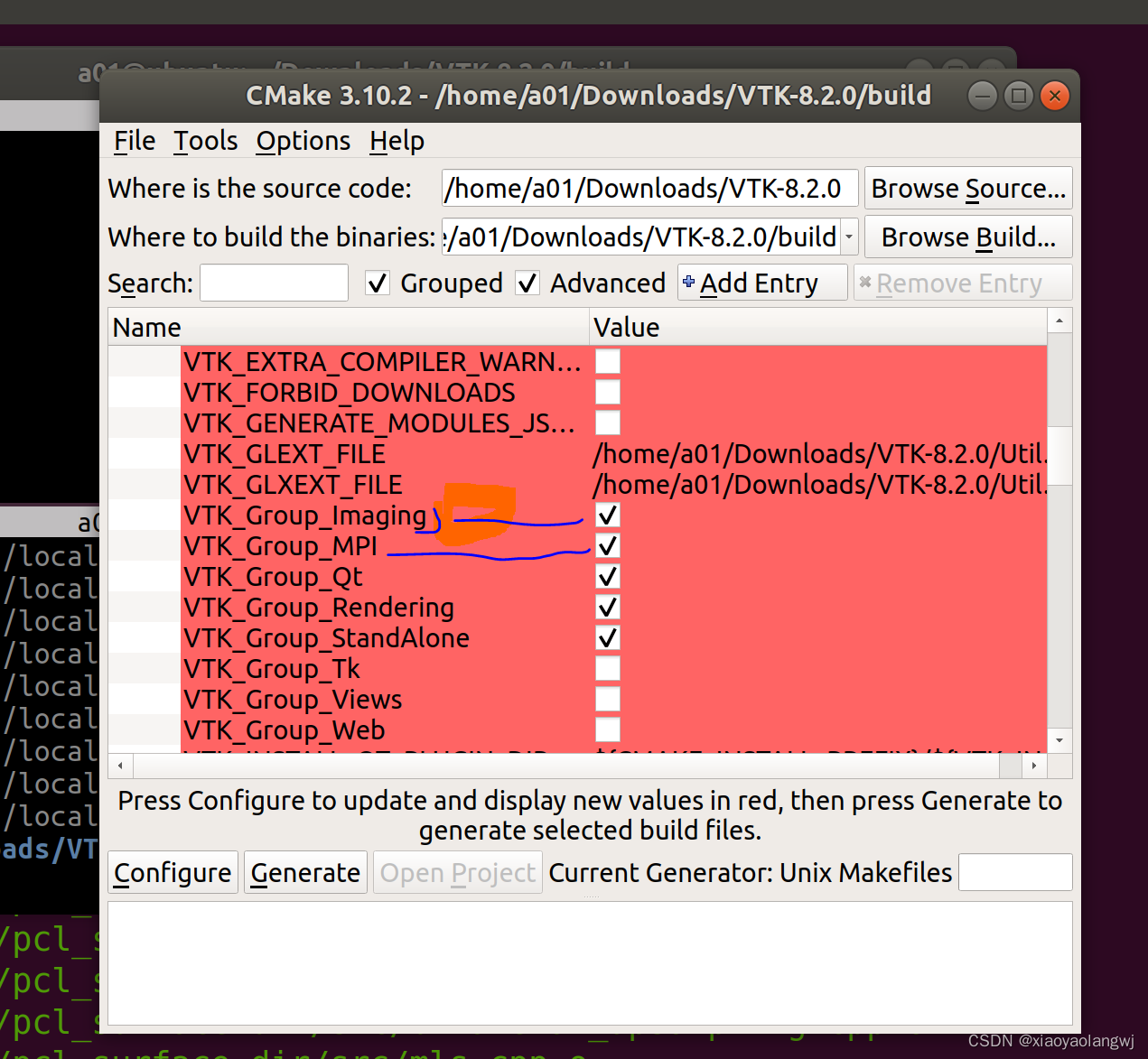
Ubuntu18.04安装pcl-1.12.1,make时报错:/usr/bin/ld: cannot find -lvtkIOMPIImage
解决方案:
在vtk安装包中,重新打开cmake-gui,然后勾选上VTK_Group_MPI和VTK_Group_Imaging。
cd VTK-8.2.0
cd build
cmake-gui然后重新编译生成。
make -j8 # 或者j4,量力而行。
sudo make install
就可以解决了。
然后重新回到pcl安装…
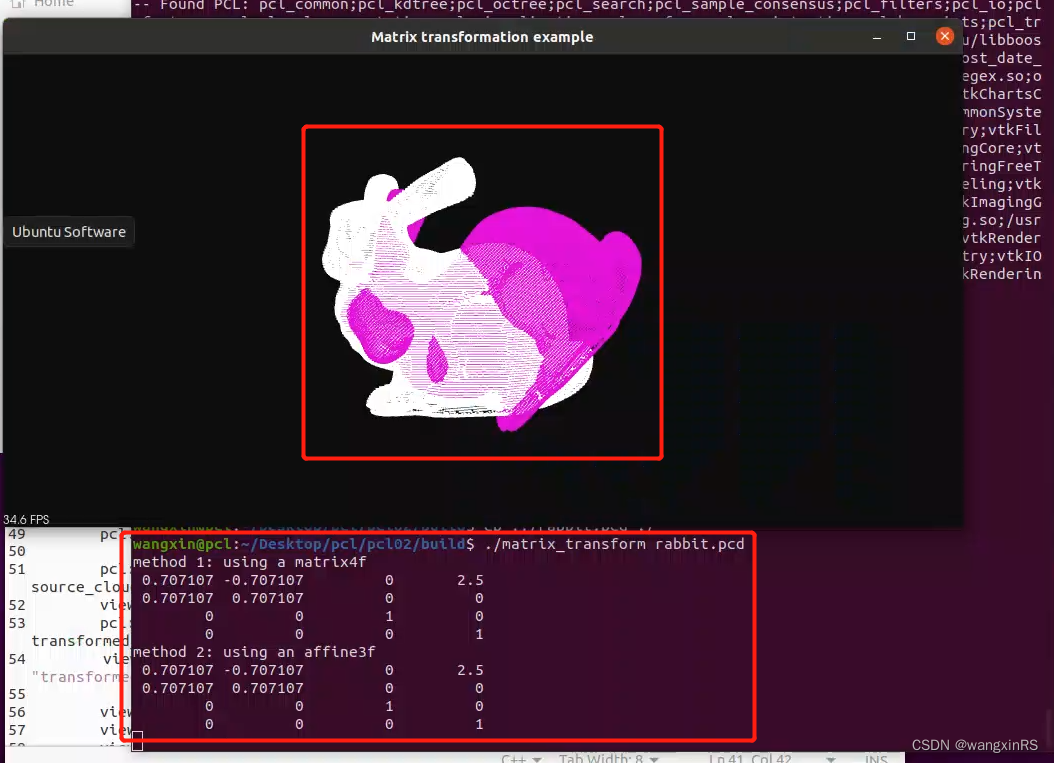
PCL入门(三):矩阵变换实现平移和旋转
目录 1. pcl中的矩阵变换是什么2. 举例:如何做矩阵变换 1. pcl中的矩阵变换是什么
通过激光传感器等设备获得的3d点云在拼接成更大场景时,需要对点云数据进行旋转和平移操作。而旋转和平移操作,就可以通过矩阵变换来实现。
点的表示
对于点…
PCL 判断点位于球内外侧
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 在之前的文章中(PCL 基于任意四点计算球心坐标),已经提到了怎么通过四个点来计算其球心坐标,基于此我们也可以判断出任意一点相对于这个球的相对位置(内部或外部)。 假设存在四个不共面的点, ( x 1 , y 1 ) …

3D点云测量:计算三个平面的交点
文章目录 0. 测试效果1. 基本内容文章目录:3D视觉测量目录0. 测试效果 1. 基本内容 计算三个平面的交点需要找到满足所有三个平面方程的点。三个平面通常由它们的法向量和通过它们的点(或参数形式的方程)来定义。以下是计算三个平面的交点的一般步骤:
假设有三个平面,分别…
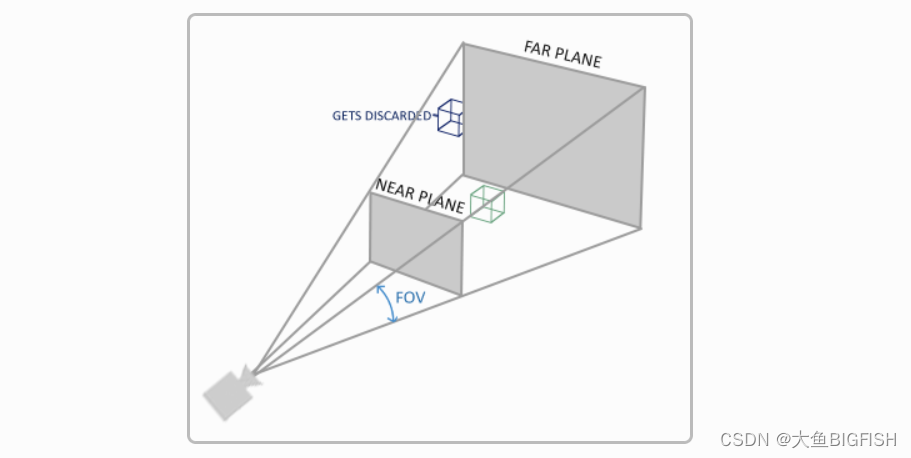
PCL 透视投影变换(OpenGL)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 在现实生活中,我们总会注意到离我们越远的东西看起来更小。这个神奇的效果被称之为透视(Perspective)。透视的效果在我们看一条无限长的高速公路或铁路时尤其明显,正如下面图片显示的这样: 由于透视的原因,平行线…
PCL 点云八叉树体素搜索
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 之前没有深入了解PCL的八叉树结构,趁着有时间了解了一下其特性,其中有一些非常有趣的操作。比如这里的体素搜索,我们有时候需要将点云进行体素化,这种做法有助于进行局部分析,自然而然就必须要快速获取某个点所…
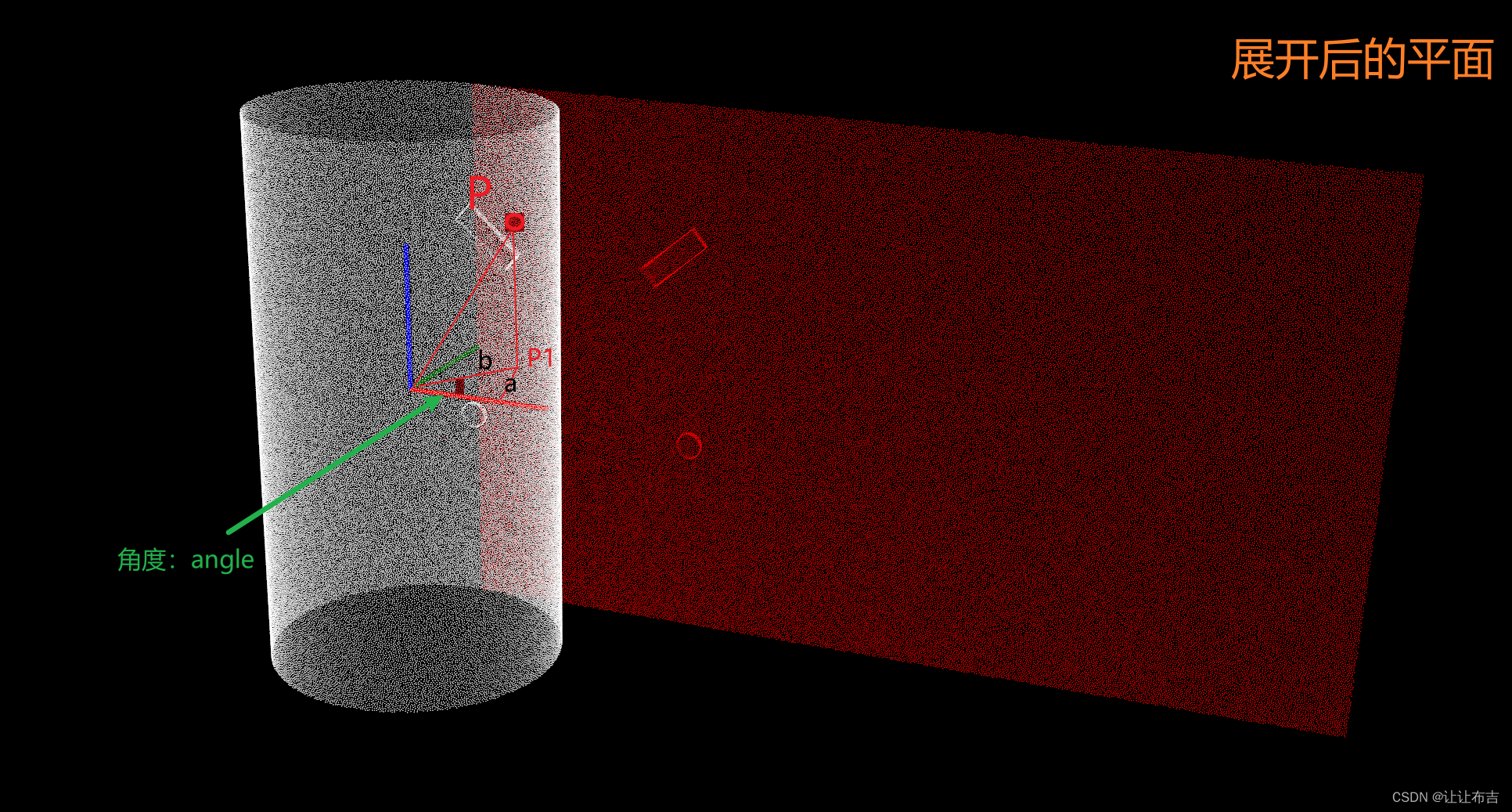
3D点云处理:圆柱侧面点云展开为平面 凹凸缺陷检测(附源码)
文章目录 1. 基本内容展开部分推导2. 展开流程3. 代码实现4. 应用文章目录:3D视觉个人学习目录微信:dhlddxB站: Non-Stop_目标:对采集的圆柱面点云展开为平面;应用:可用于检测圆柱侧面的凹凸缺陷;1. 基本内容 圆柱的侧面展开原理是将一个圆柱体(或柱体)的侧面展开成一个…

Qt Creator中使用PCL库
我之前写过一篇博客Qt 5.9使用VTK显示点云,可惜其中很多部分都是失败的,而且排版糟糕,不过其中PCL的安装以及在VS中使用PCL的方法是值得参考的,起码我通过这种方式安装的PCL在VS上一直用得OK。但是用了一段时间还是有一些小问题&a…
PCL - ICP代碼研讀(二二 ) - TransformationEstimationSVD實現
PCL - ICP代碼研讀(二二 ) - TransformationEstimationSVD實現
前言
TransformationEstimationSVD類別中有五個estimateRigidTransformation函數,其中四個是public的,另一個是protected的。前四個public的estimateRigidTransfor…
【PCL】—— PCL库的简单使用
文章目录1. 激光雷达基本概念1.1 激光雷达特点1.2 激光雷达点云定义2. 常用点云处理工具PCL(Point Cloud Library)2.1 PCL相关资料2.2 点云PCD文件格式文件头2.3 点云的有序和无序3. Vscode 极简环境配置4. 一个简单的例子5. 简单的可视化实现1. 激光雷达…
PCL - MLS代碼研讀(六)- 各式投影函數
PCL - MLS代碼研讀(六)- 各式投影函數前言projectPointToMLSPlaneprojectPointSimpleToPolynomialSurfaceprojectPointOrthogonalToPolynomialSurfaceprojectPointprojectQueryPoint前言
本篇終於接近MLS模塊的核心部分,主要介紹各式投影函數…
CAD数据转pcl可读数据
//-----------------------读取CAD模型------------------------vtkSmartPointer<vtkSTLReader> reader vtkSmartPointer<vtkSTLReader>::New();reader->SetFileName("data.stl");reader->Update();//----------------------转出到poly格式------…
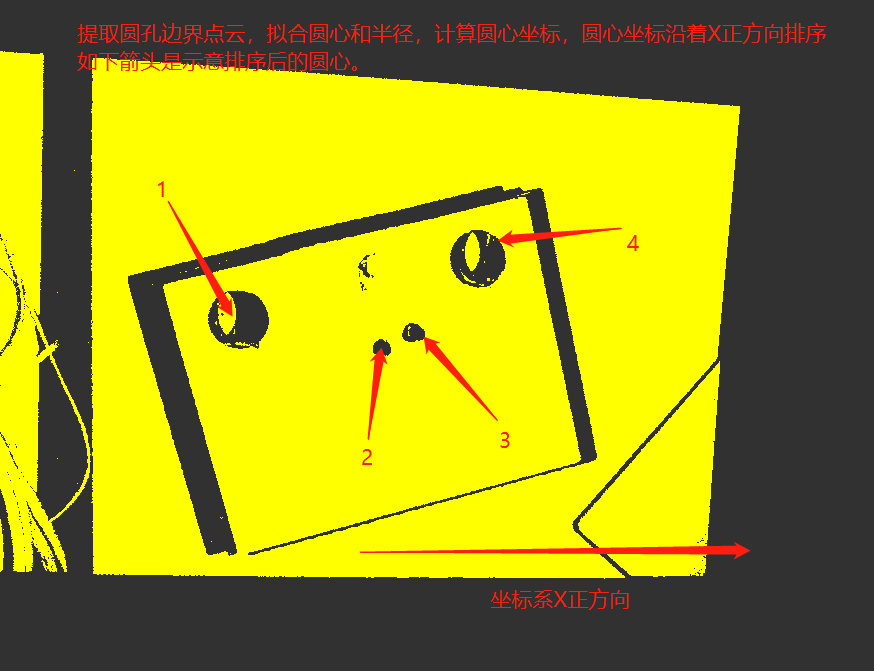
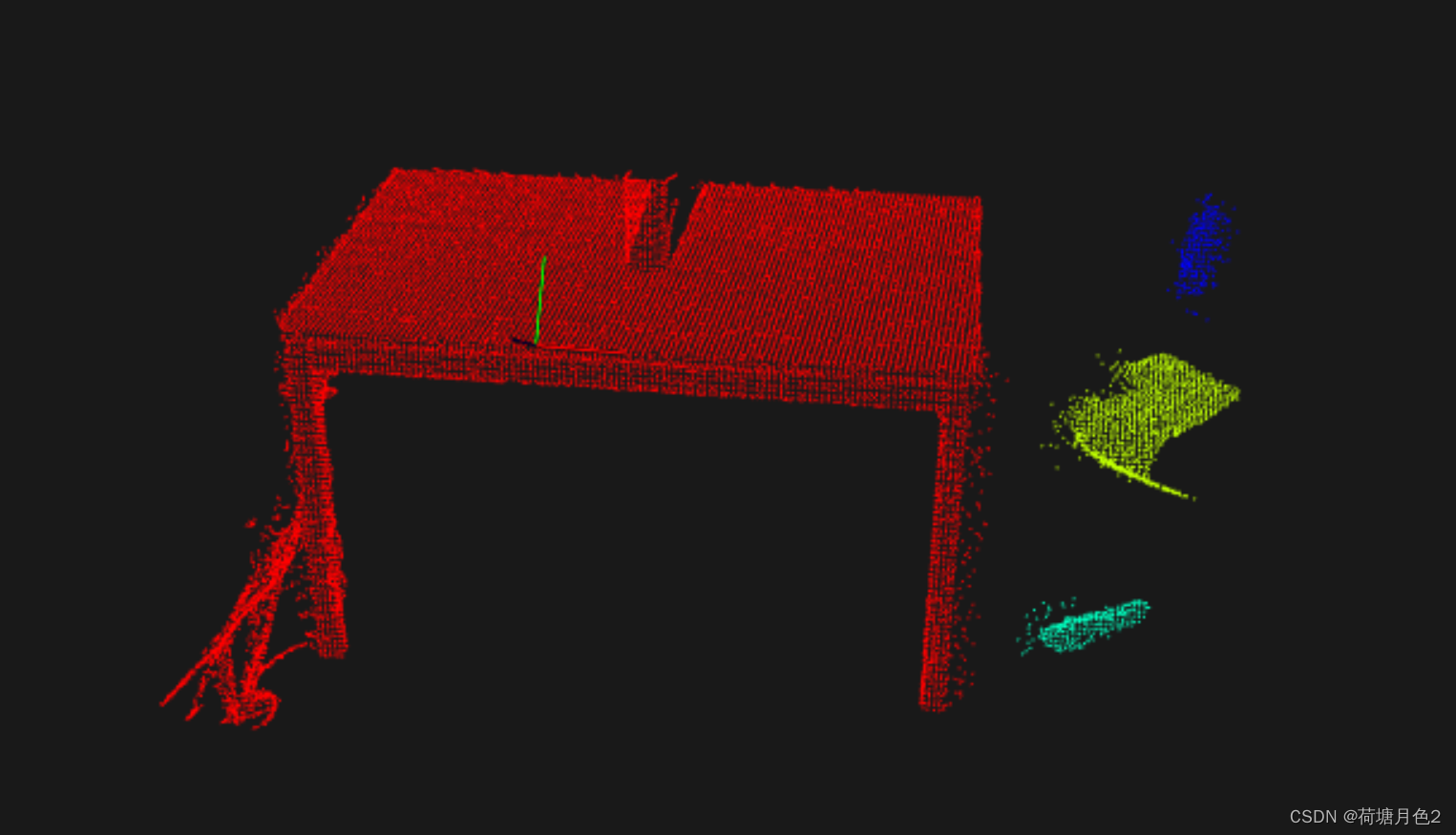
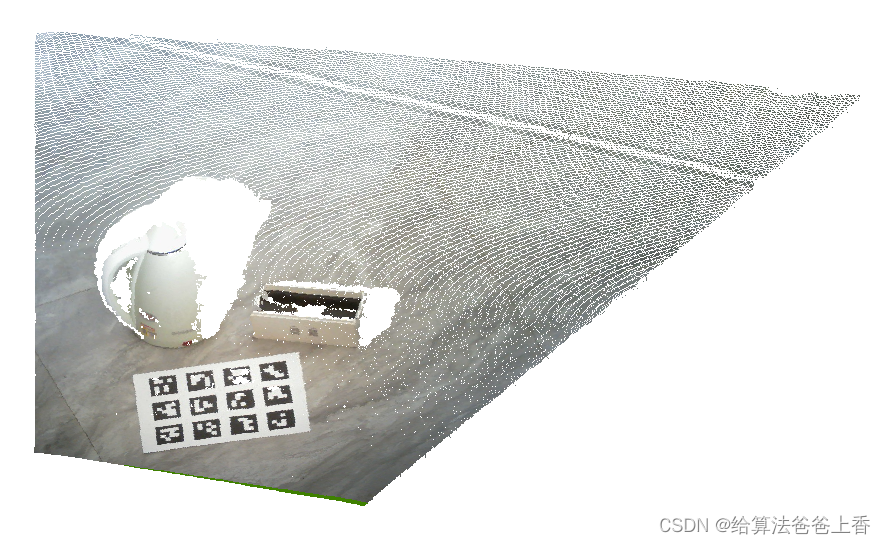
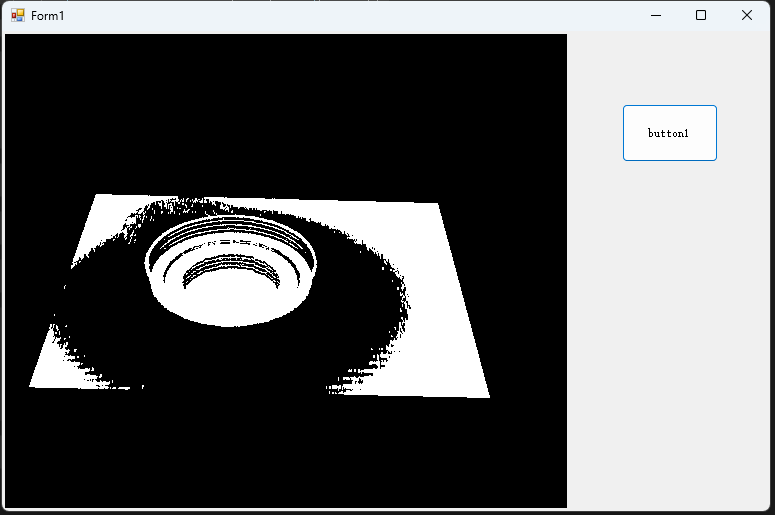
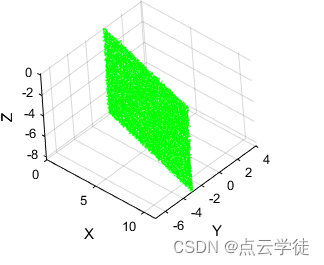
点云处理开发测试题目 完整解决方案
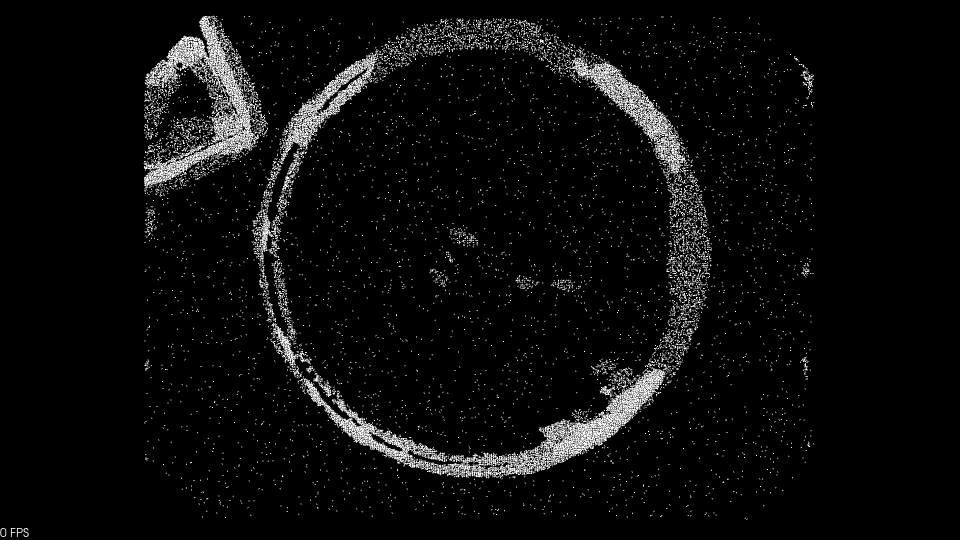
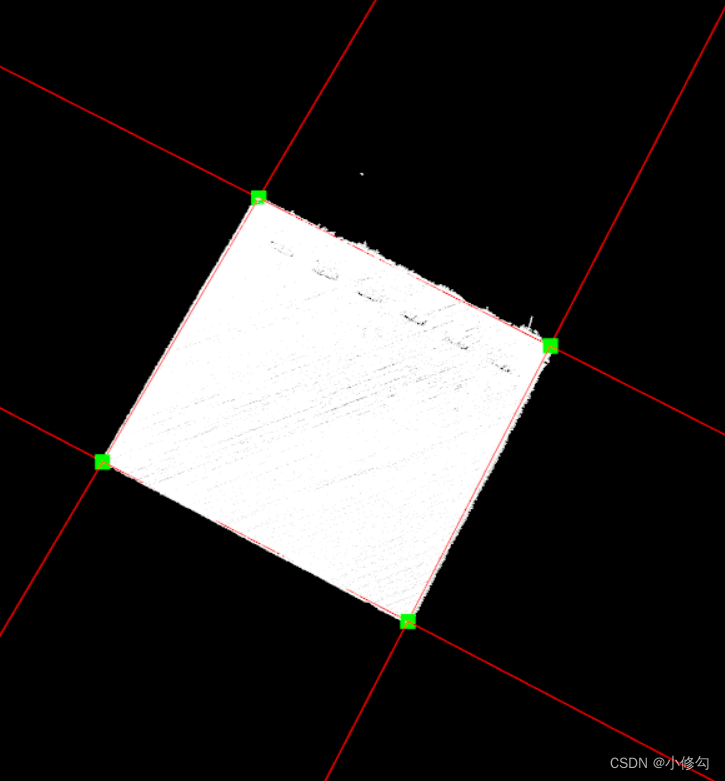
点云处理开发测试题目 文件夹中有一个场景的三块点云数据,单位mm。是一个桌子上放了一个纸箱,纸箱上有四个圆孔。需要做的内容是:
1. 绘制出最小外接立方体,得到纸箱的长宽高值。注意高度计算是纸箱平面到桌子平面的距离。 2. 计算出纸箱上的四个圆的圆心坐标和半径,对圆…
ubuntu1804安装多版本pcl
目录写在前面准备安装依赖编译源码pcl1.8pcl1.10使用参考完写在前面
1、本文内容 ubuntu1804安装多版本pcl(pcl1.8以上版本) 2、平台 ubuntu1804 3、转载请注明出处: https://blog.csdn.net/qq_41102371/article/details/125600181
准备
创建pcl文件夹
mkdir pc…
(三)QT中使用QVTKOpenGLNativeWidget的简单教程以及案例,利用PCLVisualizer显示点云
先添加一个带有ui的QT应用程序。
一、在ui界面中添加QVTKOpenGLNativeWidget控件
先拖出来一个QOpenGLWidget控件 修改布局如下: 然后将QOpenGLWidget控件提升为QVTKOpenGLNativeWidget控件,步骤如下:
右击QOpenGLWidget窗口,选…
ubuntu18.04安装pcl1.11.1
一、安装pcl1.11.1依赖
sudo apt-get update
sudo apt-get install git build-essential linux-libc-dev
sudo apt-get install cmake cmake-gui
sudo apt-get install libusb-1.0-0-dev libusb-dev libudev-dev
sudo apt-get install mpi-default-dev openmpi-bin openmpi-…
PCL入门(一):ubuntu20使用apt安装pcl
目录 0. 背景1. apt安装的版本2. 更新apt源3. apt安装命令4. 测试 0. 背景
使用源码安装pcl较为麻烦,因为存在依赖库vtk,flann,boost,eigen等,都不太好安装,因此采用apt方式安装。
下面内容主要参考博客《…
PCL 判断点位于圆内外侧(二维)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 在之前的文章中PCL 基于三个点计算圆心坐标之二(二维),已经提到了怎么通过三个点来计算其圆心坐标,基于此我们也可以判断出任意一点相对于这个圆的相对位置(内部或外部)。 假设存在逆时针的三个点, ( x 1 , …
PCL入门(四):kdtree简单介绍和使用
目录 1. kd树的意义2. kd树的使用 参考博客《欧式聚类(KD-Tree)详解,保姆级教程》和《(三分钟)学会kd-tree 激光SLAM点云搜索常见》
1. kd树的意义
kd树是什么?
kd树是一种空间划分的数据结构,对于多个维度的数据&a…

3D视觉测量:形位公差 平面度测量(附源码)
文章目录 0. 测试效果1. 基本内容2. 实现方法3. 代码实现4. 参考文章目录:形位公差测量关键内容:通过视觉方法实现GD&T中的平面度计算0. 测试效果 1. 基本内容 平面度是一个表达平面平整程度的度量指标,它描述了一个表面与一个理想平面之间的偏差程度。在工程和制造领域…
PCL点云处理之基于FPFH特征的全局配准流程具体实现(二百二十一)
PCL点云处理之基于FPFH特征的全局配准流程具体实现(二百二十一) 一、算法介绍二、算法实现1.代码2.效果一、算法介绍
PCL点云库提供的多种工具,可以组合为一套完整的点云配准流程,这里选择FPFH特征,进行具体的配准流程实现,主要内容包括点云读取、点云法线计算、点云特征…
在PCL视图器中使用随机生成的颜色来可视化一组匹配的点对
std::vector<Eigen::Vector2d> centroids_unknown_motion_underk;
std::vector<Eigen::Vector2d> centroids_unknown_motion_k;
// 进行数字填充 pcl::visualization::PCLVisualizer viewer("Centroid Visualization");int id 0;// 添加 XY 坐标系doub…

ubuntu从源码编译pcl与使用checkinstall打包安装
文章目录编译PCL1.默认已安装的一些命令工具2.安装依赖项3.源码下载与编译3.1.boost库安装3.2.qt5库安装3.3.vtk库编译3.4.pcl库编译使用checkinstall打包安装源码编译生成的库Qt Creator配置与测试pcl库编译PCL
1.默认已安装的一些命令工具
——如:git࿰…
python下使用pcl
各路安装方法参见https://github.com/strawlab/python-pcl,在此仅记录linux下的安装: 1.安装依赖库:
sudo add-apt-repository ppa:v-launchpad-jochen-sprickerhof-de/pcl sudo apt-get update sudo apt-get install libpcl-all 非常感谢http://rosclub.cn/post-682.htm…
PCL - ICP代碼研讀(十四 ) - CorrespondenceEstimation架構
PCL - ICP代碼研讀(十四 ) - CorrespondenceEstimation架構前言CorrespondenceEstimationusingconstructor和destructordetermineCorrespondences和determineReciprocalCorrespondences函數clone函數前言
CorrespondenceEstimation類別繼承自抽象類別Co…
PCL - ICP代碼研讀(十六 ) - CorrespondenceRejector架構
PCL - ICP代碼研讀(十六 ) - CorrespondenceRejector架構前言CorrespondenceRejectorusingconstructor和destructor輸入點對的setter和getter配對拒絕相關函數getClassName點雲,法向量設定相關函數protected成員前言
CorrespondenceRejector…
PCL - ICP代碼研讀(二七) - TransformationEstimationPointToPlaneLLS實現
PCL - ICP代碼研讀(二七) - TransformationEstimationPointToPlaneLLS實現前言TransformationEstimationPointToPlaneLLSestimateRigidTransformation的wrapperconstructTransformationMatrixestimateRigidTransformation前言
TransformationEstimation…
PCL 点云法向量重定向(MST,最小生成树)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 该方法主要分为两个过程: (1)指定数据点的邻近点数。通过查找每一个点的邻近点集,使用邻近点集的协方差估计出每个点的法向量。 (2)基于连续切平面方向一致性来重定向法向量。论文中的想法是这样的,假设两个…
点云处理【七】(点云配准)
点云处理
第一章 点云数据采集 1.点云配准
点云配准是将两个或多个点云数据集融合到一个统一的坐标系统中的过程。这通常是为了创建一个完整的模型或融合从不同视角采集的数据。 点云配准一般分为粗配准和精配准,粗配准指的是在两幅点云之间的变换完全未知的情况下…
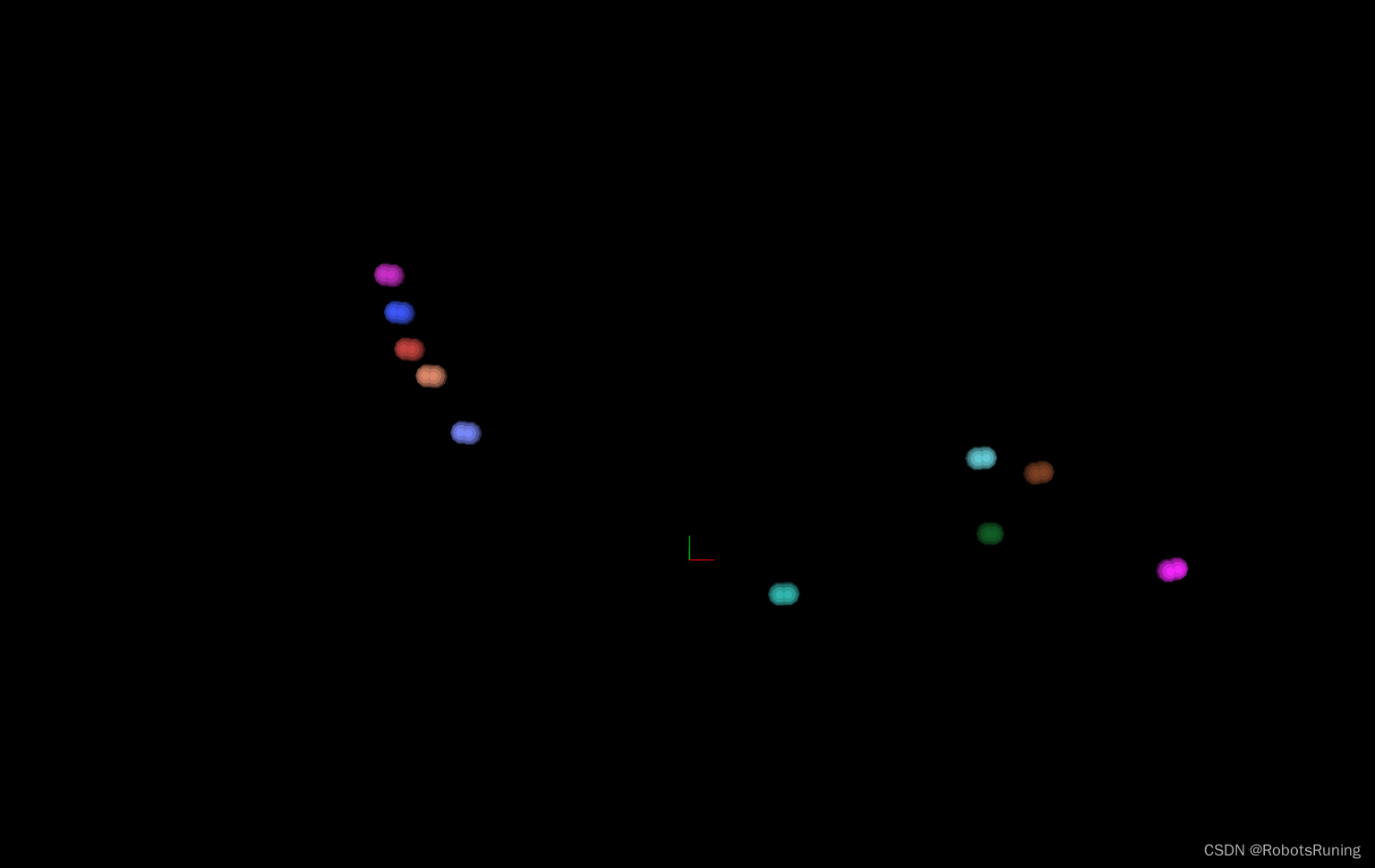
PCL显示double类型的点云方案
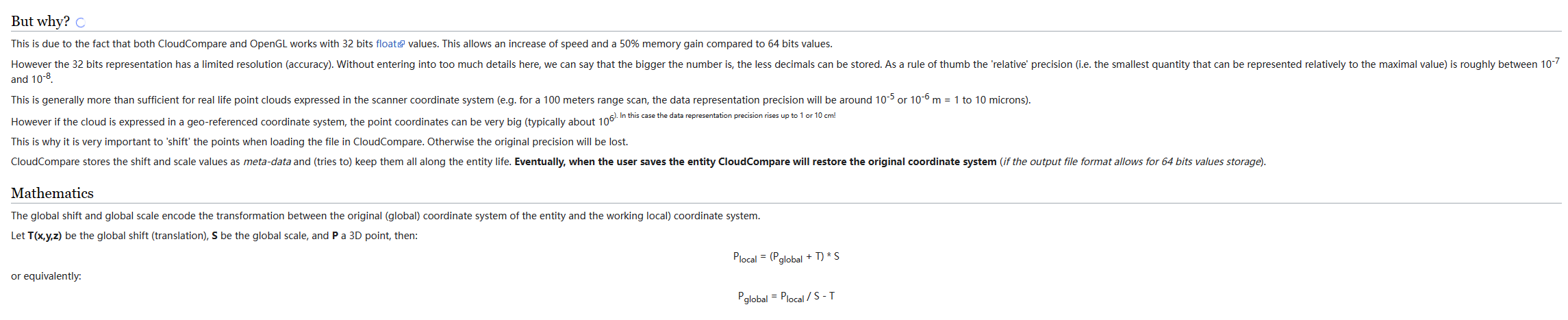
前言
我们知道,PCL和OpenGL等三维可视化软件一样,为了兼顾性能需求,只支持加载Float类型的点云数据,但是当我们对精度要求太高时,Float类型支持不了我们的精度要求,我们的数据必须用Double类型存储才可以&…
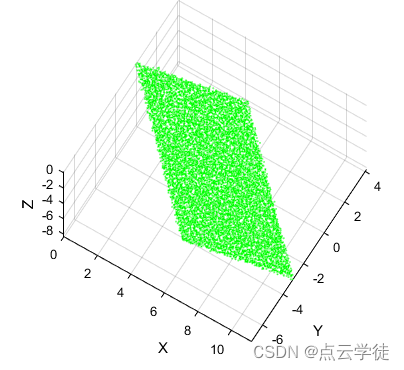
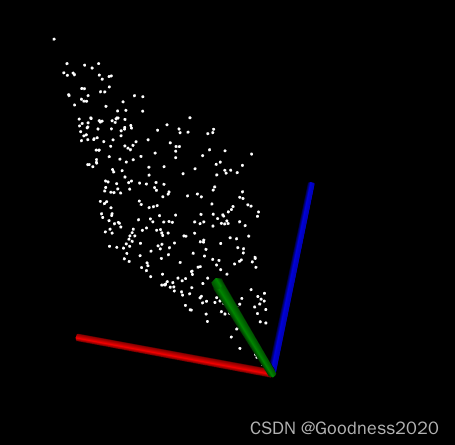
球面点云的生成以及pcl用已知参数模型提取点云
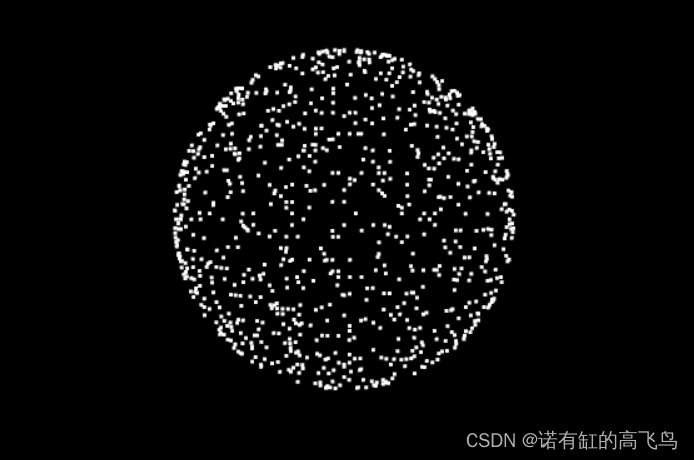
目录写在前面codemodel_outlier_removal.cppCMakeLists.txtcompile&run结果参考写在前面
1、本文内容 球面点云的生成,添加噪声后,pc实现用已知参数模型提取点云
2、平台 pcl 1.10.0 3、转载请注明出处: https://blog.csdn.net/qq_4110…
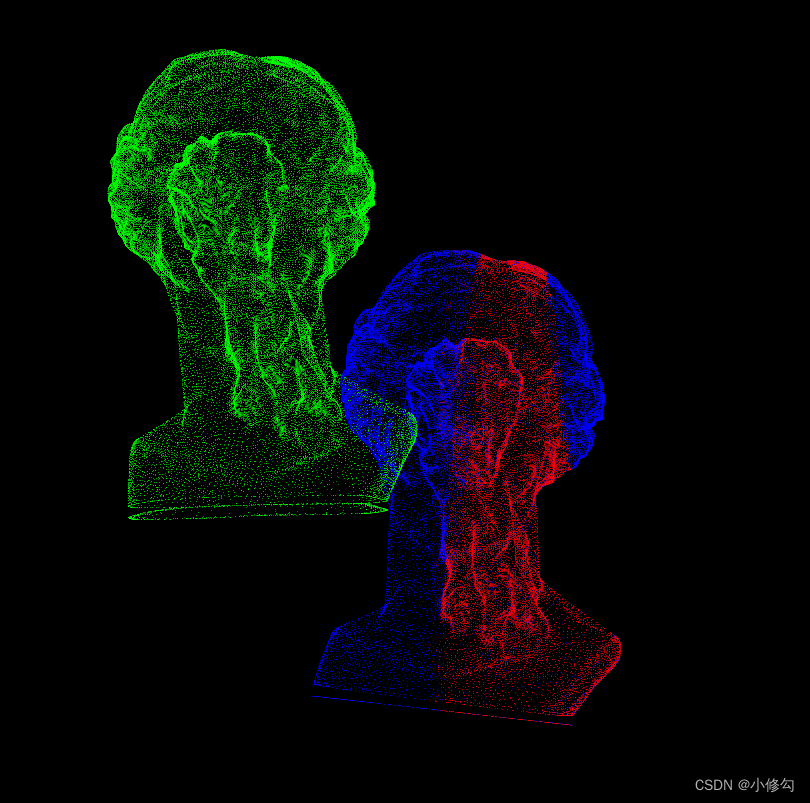
PCL ICP精配准(点到点)
文章目录 一、简介二、实现过程三、实现效果参考资料一、简介 迭代最近点(ICP)算法作为是目前最常用的刚性点集配准方法,它有着简单、计算复杂度低等优点,该算法的具体计算过程如下: (1)在目标点云P中取点集 p i ∈ P p_i∈P p

pcl 中的滤波与降采样
目录pcl filter模块RandomSampleUniformSamplingVoxelGridStatisticalOutlierRemoval filter应用参考完pcl filter模块
Module filters:https://pointclouds.org/documentation/group__filters.html RandomSample、UniformSampling、VoxelGrid都包含在其中
Random…
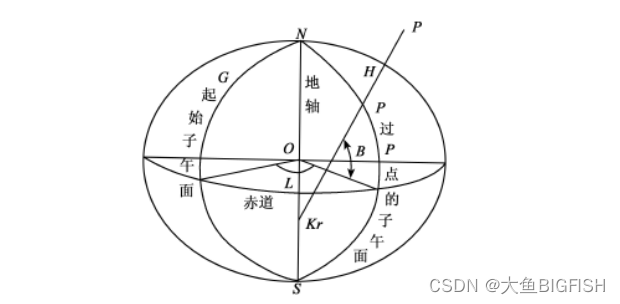
PCL 空间直角坐标转大地坐标
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 地面上一点的空间位置可用大地坐标( B, L, H) 表示。大地坐标系是以参考椭球面作为基准面, 以起始子午面和赤道面作为在椭球面上确定某一点投影位置的两个参考面。如下图所示, 过地面点 P 的子午面与起始子午面之间…
如何学习、上手点云算法(三):用VsCode、Visual Studio来debug基于PCL、Open3D的代码
写在前面 本文内容 以PCL 1.14.0,Open3D0.14.1为例,对基于PCL、Open3D开发的代码进行源码debug; 如何学习、上手点云算法系列: 如何学习、上手点云算法(一):点云基础 如何学习、上手点云算法(二):点云处理相…
PCL点云处理之M估计样本一致性(MSAC)平面拟合(二百三十六)
PCL点云处理之M估计样本一致性(MSAC)平面拟合(二百三十五六) 一、算法介绍二、使用步骤1.代码2.效果一、算法介绍
写论文当然用RANSAC的优化变种算法MSAC啊,RANSAC太土太LOW了哈哈
MSAC算法(M-estimator Sample Consensus)是RANSAC(Random Sample Consensus)的一种…
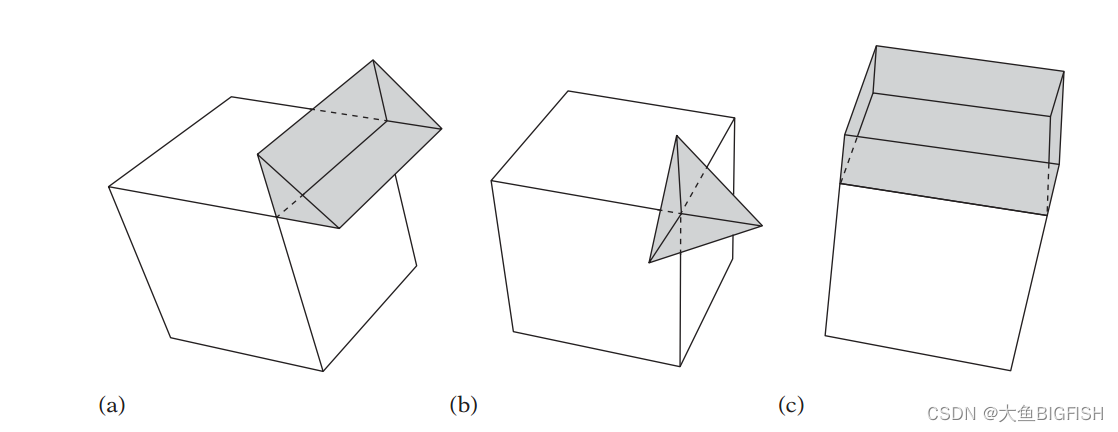
PCL 计算一个平面与一个三角形的交线
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 这里实现一个很有趣的功能,就是获取一个平面与一个三角形的交线,具体的思路很简单,就是借助之前的博客中的思路:Matlab 计算一个平面与一条线段的交点,我们只需要遍历三角形中的所有边即可获取我们想要的交线,…
点云处理【三】(点云降采样)
点云降采样
第一章 点云数据采集 第二章 点云滤波 第二章 点云降采样 1. 为什么要降采样?
我们获得的数据量大,特别是几十万个以上的点云,里面有很多冗余数据,会导致处理起来比较耗时。 降采样是一种有效的减少数据、缩减计算量…

3D点云处理:位姿旋转 抓取点旋转 坐标系旋转(附源码)
文章目录 0. 测试效果1. 基本内容2. 代码实现文章目录:3D视觉个人学习目录微信:dhlddxB站: Non-Stop_目标:根据指定的规则旋转指定轴;应用:一般应用在3D抓取业务中,保证计算的位姿中的z轴指向相机;0. 测试效果 简单测试示例 1. 基本内容 在三维空间中绕固定轴旋转指定的…
深度相机和彩色相机对齐(d2c)
一般商用的rgbd相机的sdk自带d2c的api,但是LZ还是想利用空闲时间理解下其原理。 第一步:标定彩色相机和深度相机。 分别采集若干张彩色摄像头和红外摄像头(对于带有红外摄像头进行深度测量的深度摄像头,红外摄像头和深度摄像头其实…
《PCL多线程加速处理》-滤波-统计滤波
《PCL多线程加速处理》-滤波-统计滤波 一、效果展示二、实现方式三、代码一、效果展示
提升速度随着点云越多效果越明显
二、实现方式
1、原始的统计滤波实现方式
#include <pcl/filters/statistical_outlier_removal.h>pcl::PointCloud<pcl::PointXYZ
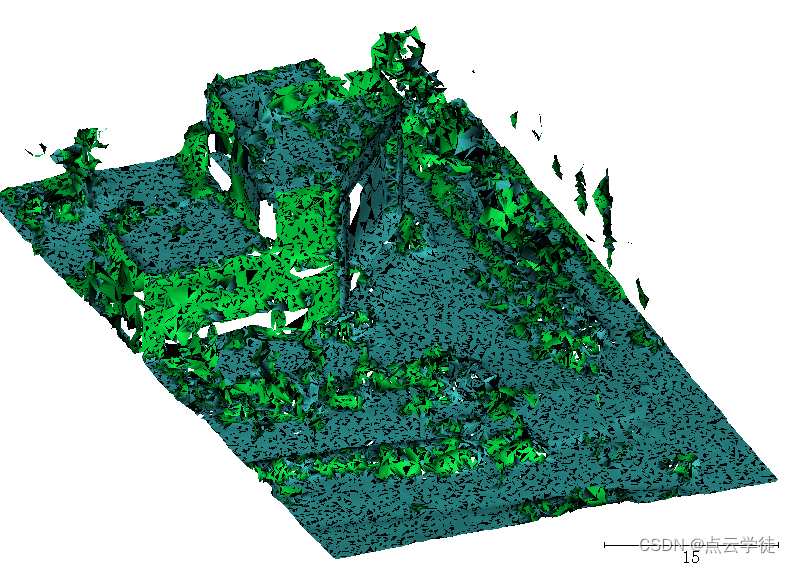
PCL点云处理之点云重建为Mesh模型并保存到PLY文件 ---方法二 (二百一十一)
PCL点云处理之点云重建为Mesh模型并保存到PLY文件 ---方法二 (二百一十一) 一、算法介绍二、算法实现1.代码2.效果一、算法介绍
离散点云重建为mesh网格模型,并保存到PLY文件中,用于其他软件打开查看,代码非常简短,复制粘贴即可迅速上手使用,具体参数根据自己的点云数据…

C++ PCL点云局部颜色变换
程序示例精选 C PCL点云局部颜色变换 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言
这篇博客针对《C PCL点云局部颜色变换》编写代码,代码整洁,规则,易读。 学习与应用…
【PCL-10】PCL删除点云中x、y、z都为0的点
1、导入点云库
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/filters/extract_indices.h>
2、创建空的PointIndices对象,用于存储需要删除的点的索引
pcl::PointIndices::Ptr indices (new pcl::PointIndices);
3…
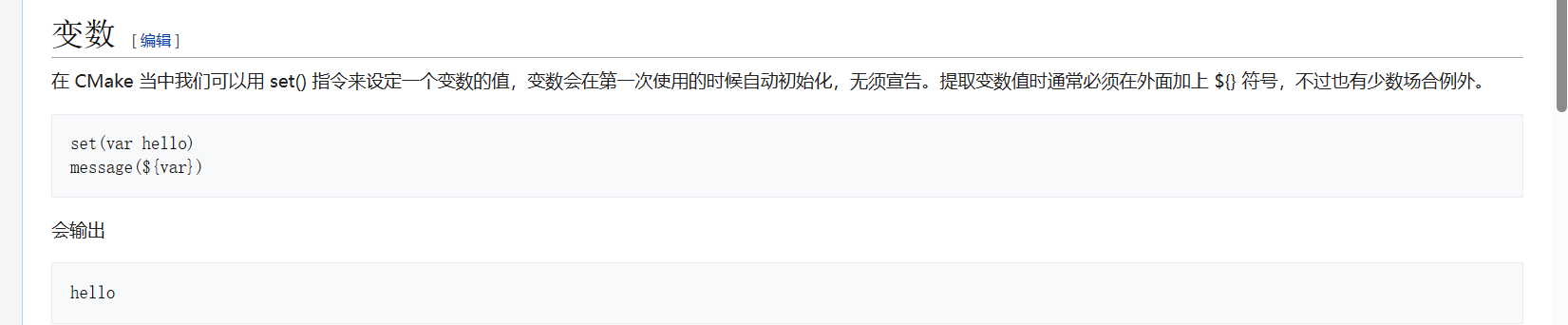
【PCL】(二)CMake编译
(二)编译
将以下代码写到pcd_write.cpp中,并放到项目/PATH/TO/MY/GRAND/PROJECT/project中。 #include <iostream>#include <pcl/io/pcd_io.h>#include <pcl/point_types.h>intmain (){pcl::PointCloud<pcl::PointXYZ&…
【PCL】(三十四)基于八叉树的点云空间变化检测
(三十四)基于八叉树的点云空间变化检测
octree_change_detection.cpp
#include <pcl/point_cloud.h>
#include <pcl/octree/octree_pointcloud_changedetector.h>#include <iostream>
#include <vector>
#include <ctime&g…
3D点云处理:Opencv Pcl实现深度图转点云(附源码)
文章目录 0. 测试效果1. 代码实现文章目录:3D视觉个人学习目录微信:dhlddxB站: Non-Stop_0. 测试效果 处理结果1. 代码实现
文章中提供的深度图像,深度图像一般以.tiff和.png保存,可以通过Opencv中的

PCL-IO输入输入模块
IO输入输入模块 一、概述二、点云数据格式1. PCD 格式2. PLY 格式3. OBJ 格式4. STL 格式5. OFF 格式 三、读取3D文件1. API 总览2. 示例 四、保存3D文件1. API 总览2. 示例 一、概述
PCL 库提供了一个模块用来对3D数据进行读写操作,这个库提供了一个模块ÿ…
【PCL】(二十九)渐进形态学滤波器分割地面点
(二十九)渐进形态学滤波器分割地面点
论文:A Progressive Morphological Filter for Removing Nonground Measurements from Airborne LIDAR Data
bare_earth.cpp
#include <iostream>
#include <pcl/io/pcd_io.h>
#include &…
如何学习、上手点云算法(二):点云处理相关开源算法库、软件、工具
写在前面 本文内容 一些用于点云处理的开源算法库、软件介绍,主要包含: CloudCompare, MeshLab, PCL, Open3D, VTK, CGAL等 不定时更新 平台/环境 Windows10, Ubuntu1804, CMake, Open3D, PCL 转载请注明出处: https://blog.csdn.net/qq_41…
ubuntu18.04中PCL点云库依赖的安装以及PCL点云库和Eigen的卸载与安装
一、PCL点云库依赖的安装、遇到问题的解决方法
sudo add-apt-repository ppa:v-launchpad-jochen-sprickerhof-de/pcl
sudo apt-get update
sudo apt-get install libpcl-all 以上是官方给出的,但是会出很多报错,这里建议自己配置。
配置步骤ÿ…
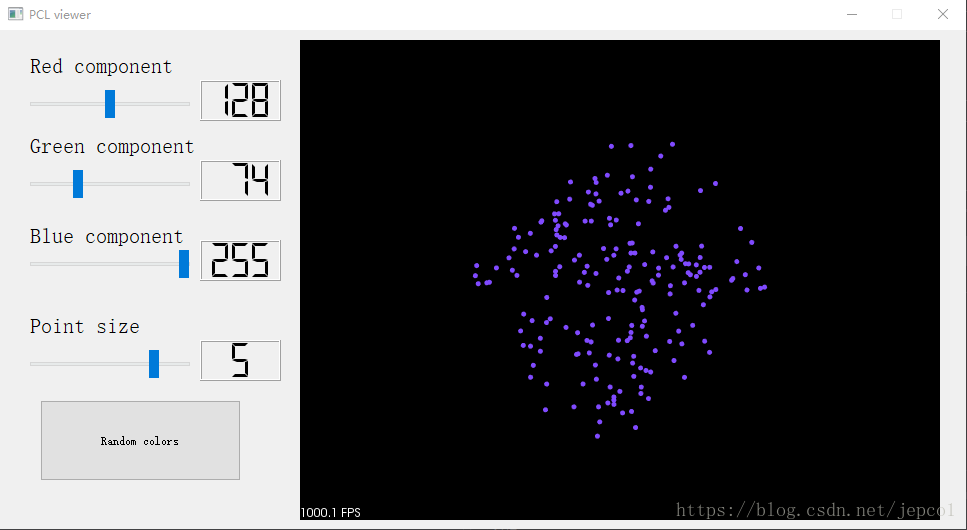
PCL QT visualizer
PCL QT visualizer
用Qt创建PCL 可视化应用程序。
项目组织 UI界面 Compile & Run
cmake -B build -S . -DCMAKE_TOOLCHAIN_FILED:\vcpkg\scripts\buildsystems\vcpkg.cmakecmake --build build --config Releasewindeployqt6.exe .\pcl_visualizer.exe.\build\Release\…

PCL常用的点云操作
PCL常用的点云操作 1、PCL有序点云分析2、PCL绘制直线3、获取点云质心4、判断点云是否是非数5、移除无效点6、PCL计算两点之间的欧式距离 1、PCL有序点云分析 对于有序点云可以通过 at 的方式访问,但是,需要注意的是,正确的访问方式是 at(w, …

【PCL】—— 点云滤波
文章目录 直通滤波降采样使用统计滤波(statisticalOutlierRemoval)移除离群点使用条件滤波(ConditionalRemoval)或 半径滤波(RadiusOutlinerRemoval)移除离群点 在获取点云数据时,由于设备精度&…

PCL点云处理之计算两条直线间最短连线的端点 (二百零三)
PCL点云处理之计算两条直线间最短连线的端点 (二百零三) 一、算法目的二、具体实现1.代码2.结果一、算法目的
条件:给定两条直线,直线采用直线上一点和直线方向来确定 要求:求两条直线间的最短连线线段,获取它的两个端点
具体的算法实现如下,提供了示例直线和计算结果进…
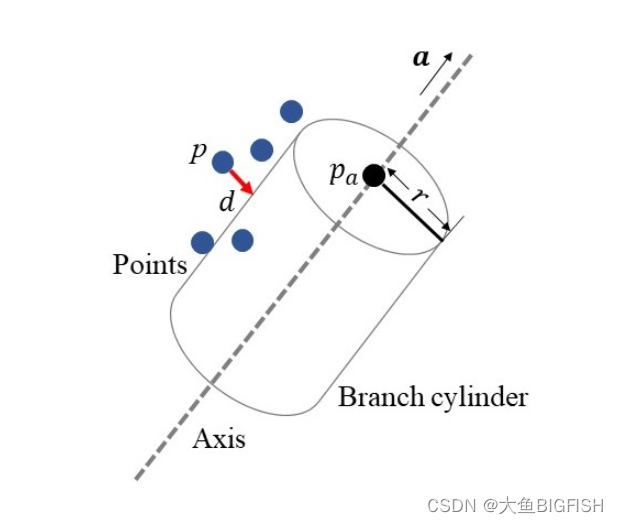
PCL 非线性最小二乘法拟合圆柱
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 这里通过非线性最小二乘的方法来实现圆柱体的拟合,具体的计算过程如下所述: 图中, p p p为输入数据的点位置,求解的参数为柱体的轴向向量 a
PCL 空间两条直线交点计算
空间两条直线交点计算 效果代码效果
图中绿色点为四条直线交点
代码
pcl::PointXYZget2linePoint(pcl::ModelCoefficients p1, pcl::ModelCoefficients p2)
{pcl::PointXYZ result;double x1 =</
VTK源码编译安装记录与教程(VS2019+QT5.15.2+PCL1.12.1+VTK9.1.0配置,超详细)
因为PCL库(傻瓜式安装)中自动安装的VTK库并不完整,不支持QT环境的UI界面开发,于是,想用QT在VS2019上开发图形界面程序,需要单独自己通过VTK源码编译安装,再进行配置。本人安装时开发环境已经装好…
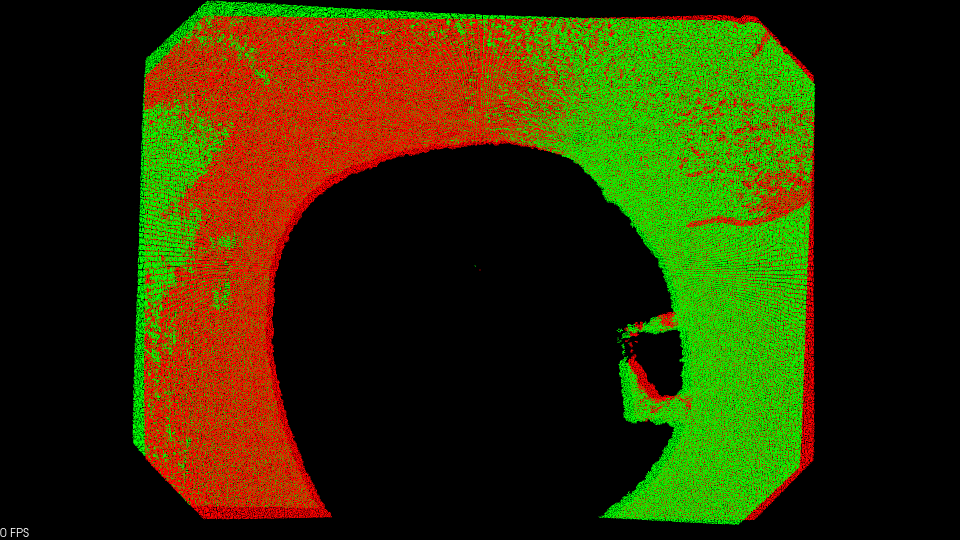
PCL可视化机载点云异常 归一化显示点云
文章目录 1. 基本内容2. 可视化方法3. 代码实现4. 参考目标:机载点云数据坐标过大,导致利用pcl进行可视化时出现异常(无法正常查看点云);1. 基本内容 参考过PCL可视化对于机载点云显示不出的问题及其解决这个链接的方法,无奈可视化出来的点云是失败的点云,后面会说一下如…
ros2+pcl入门范例
简单范例
功能描述
读取一段pcl点云序列,并发布到名为“pt”的topic。然后通过rviz2观察点云
环境准备
ubuntu18.04ros2(eloquent此版本需要于Ubuntu对应) Python(version3.6需要于eloquent对应)PCLEIGENrviz2 具体…
PCL - PCLBase代碼研讀(一)- PCLBase架構
PCL - PCLBase代碼研讀(一)- PCLBase架構
前言
PCLBase中定義了幾個成員變量和函數,在PCL的大部分模組中,都會透過繼承PCLBase來使用這些成員變量和函數。surface/include/pcl/surface/mls.h裡定義的pcl::MovingLeastSquares類別…
点云配准6:tricp算法在pcl上的实现
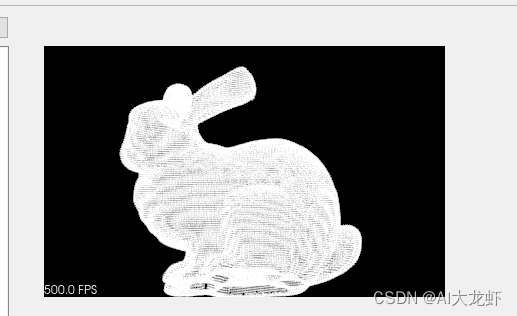
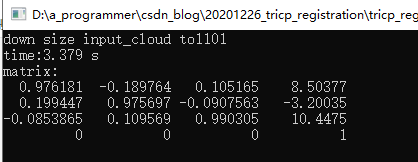
目录配准结果点云配准系列准备完整项目文件参数设定及说明数据参数代码结果Bunnyhippo算法小结参考及感谢完配准结果
红色是目标点云(target),绿色是源点云(source),蓝色是配准后的源点云。 对Bunny成功实…

PCL入门(六):深度图提取边界
目录 1. 深度图介绍2. 深度图生成3. 边界提取 1. 深度图介绍
参考《02-深度图》
深度图像(Depth Images)也被称为距离影像(Range Image),是指将从图像采集器到场景中各点的距离值作为像素值的图像,它直接…

《PCL多线程加速处理》-滤波-半径滤波
《PCL多线程加速处理》-滤波-半径滤波 时间对比具体实现代码时间对比
针对数据庞大的点云,耗时提升明显,数据较小的点云,时间不明显,甚至不如 具体实现
1、vs中开启openmp
2、原pcl中半径滤波实现
#include <pcl/filters/radius_outlier_removal.h>
pcl
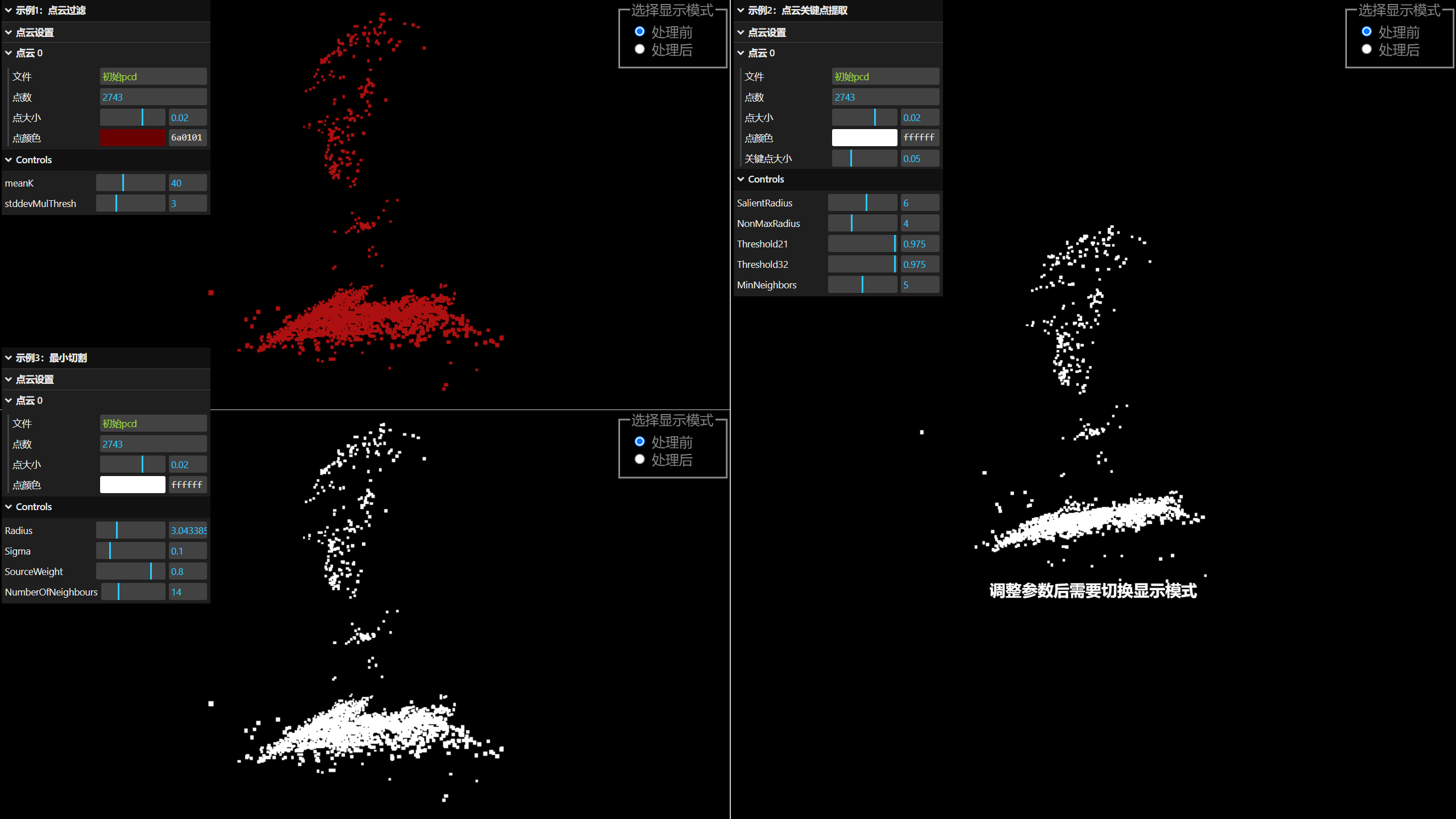
Three.js+pcl.js 实现Web端的点云处理+显示
1 功能实现
在前面我们实现了PCD的加载器的基础上,这次将加上 pcl.js —— 著名的PCL库的web版本,详情见https://pcl.js.org/,来处理我们加载上去的点云。
具体实现如下: 用户可以通过每个板块的右上角进行处理前 / 后的切换&am…

pcl的polygonmesh在cloudcompare显示异常
一个polygonMesh文件在PCL显示是这样的: 把它保存成ply,然后用cc打开却是这样的: 这看起来像是某些三角面片没有被保存下来,实际上是因为保存的polygonmesh带有法线信息被pcl区分正反面,这些黑色的小三角它的法线朝向和绿色的不一样. 一个解决办法是清除法线.在cloudcompare选…
CeresPCL ICP精配准(点到面)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 ICP算法总共分为6个阶段,如下图所示: (1)挑选发生重叠的点云子集,这一步如果原始点云数据量比较巨大,一般会对原始点云进行下采样操作。 (2)匹配特征点。通常是距离最近的两个点,当然这需要视评判的准则而…

open3d生成ply文件在pcl中无法读取问题
目录问题原因解决代码完问题
open3d生成的ply文件在pcl中无法解析,出现 Failed to find match for field ‘x’. Failed to find match for field ‘y’. Failed to find match for field ‘z’. 导致文件无法读取
原因
open3d保存的ply文件可以是binary&#x…

【PCL-11】提取平面上层的目标物,剔除平面下层目标物
因项目需求,需提取平面上的物体,不提取平面下的物体,尝试采用超体聚类LCCP分割的方式,但由于上层点云模型一侧有空洞,导致分割效果不理想。 这里采用pcl::ExtractPolygonalPrismData类,实现平面上物体的提取…
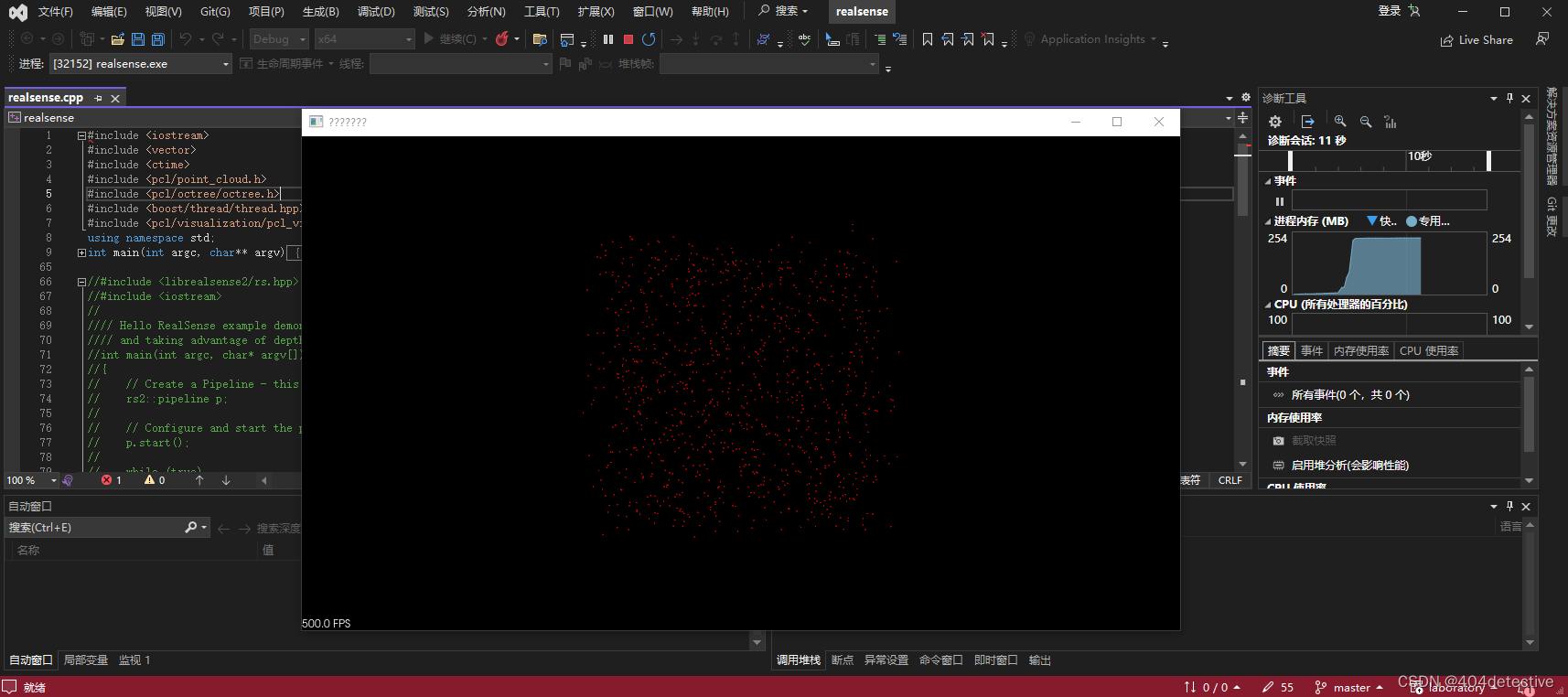
RealSense最简单配置环境只需要5分钟,不用自行添加任何包含目录、库目录。Visual Studio2022、C++。
又开始搞点云了,现在用的是Intel的realsense。
看网上步骤都挺繁琐的,本文搭建只需要3分钟。直接用官方提供的属性表,不用自行添加任何包含目录、库目录。
第一分钟:用Visual Studio新建一个工程(此时你是没有intel.…
点云绪论(点云数据及获取、点云数据处理、常用软件及开源库)
文章目录 点云数据及获取点云数据处理常用软件及开源库 点云数据及获取 定义 点云(point cloud): 三维点的数据集合属性 三维坐标 强度 颜色 时间戳 点云组织形式: organized: the point cloud is laid out as a 2D array of points that resemblesan image like structure…

C++ PCL三维点云物体目标识别
程序示例精选 C PCL三维点云物体目标识别 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言
这篇博客针对<<C PCL三维点云物体目标识别>>编写代码,代码整洁,规则ÿ…
PCL 点到圆柱的距离(3D)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 这里的思路也很简单,我们只需要将点转换到圆柱坐标系下,在该系统中,点(0,0,0)为圆柱轴原点,(0,0,1)为圆柱轴方向,那么此时计算点到圆柱的距离就简单很多了,我们可以利用正射投影快速的获得距离结果。 二、实现…
PCL 点云组件聚类
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 该算法与欧式聚类、DBSCAN聚类很是类似,聚类过程如下所述: 1. 首先,我们需要提供一个种子点集合,对种子点集合进行初始的聚类操作,聚类的评估器(即聚类条件),可以指定为法向评估,也可以是距离评估,以此我…
各类软硬件简易资料830个共2.1G,感兴趣的小伙伴自行下载
截图只是部分,具体看下面目录,图片下面也有获取地址 下载地址:https://bbs.usoftchina.com/thread-211131-1-2.html 技术交流:78709199
目录内容: 0001、PC与单片机通信(RS232) 0002、C与VB语言…

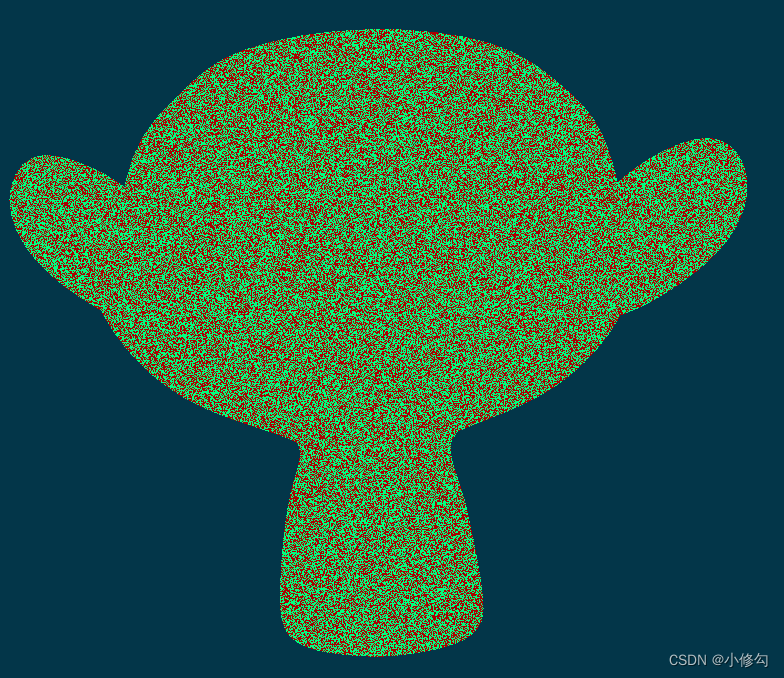
c++ pcl点云变换骨架枝干添加树叶源码实例
程序示例精选 c pcl点云变换骨架枝干添加树叶源码实例 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言
这篇博客针对《c pcl点云变换骨架枝干添加树叶源码实例》编写代码,代码整洁,…

点云处理【六】(点云分割)
点云分割
第一章 点云数据采集 1. 点云分割
点云数据中包含目标物体,点云分割算法即将物体分割出来。
2 分割算法
2.1 RANSAC(随机采样一致性)方法
基于随机采样一致性的分割的步骤如下: 1.从一个样本集S中,随机抽取n个样本,…

【编程实践】利用Alpha Shape凹包提取三维点云某个投影下的边界
1 程序执行结果
实现效果:白色的为提取的点云边界(体素下采样叶节点参数setLeafSize(0.1f,0.1f,0.1f),投影至Z0平面,concave hull参数为0.3) 实现效果:白色的为提取的点云边界(体素下采样叶节…
编译pcl库的过程中遇到的问题及解决
为了跑通QtKittiVisualizer项目的源码,必须要编译vtk和pcl这两个库。这里说说pcl库编译的过程中遇到的问题及解决。
先patch一下:patch -p1 < ~/QtKittiVisualizer/patches/pcl-1.12.1/link-required-vtk-libraries-for-libpcl_io.patch
结果报错&a…
自动生成数控加工的轨迹刀具轨迹阿基米德螺旋线(3D)
文章目录 1. 阿基米德螺旋线2. 生成步骤目标: 基于点云自动生成阿基米德螺旋线轨迹点 针对的是半球形模型效果 1. 阿基米德螺旋线
阿基米德螺旋线(Archimedean spiral)是一种数学曲线,由古希腊数学家阿基米德(Archimedes)在公元前225年左右首次研究和描述。这条曲线的方…
PCL 添加自定义数据类型
文章目录 一、简介二、举个栗子三、实现效果参考资料一、简介 PCL带有各种预定义的点类型,从用于XYZ数据的sse对齐结构,到更复杂的n维直方图表示,如PFH(点特征直方图)。这些类型应该足以支持PCL中实现的所有算法和方法。然而,在某些情况下,用户仍然希望定义新的类型。 二、…
点云平面拟合和球面拟合
一、介绍
In this tutorial we learn how to use a RandomSampleConsensus with a plane model to obtain the cloud fitting to this model.
二、代码
#include <iostream>
#include <thread>
#include <pcl/point_types.h>
#include <pcl/common/io.…
PCL 点云旋转之轴角式
文章目录 一、简介二、实现代码(以旋转平面为例)三、实现效果参考资料一、简介 三维空间中表示旋转的方法有很多种,轴角式是其中非常经典的一种表示方式。虽然欧拉角表示旋转的方法很是常用,但欧拉角存在着万向锁这个问题,因此轴角式旋转在旋转使用中更为合适。其原理也很…
网格数据采样—— mesh数据采样为点
网格数据采样为点云
一、 VS中效果展示
二、集成到qt中 三、cloudcompare实现 采样对比:红色为算法采集,绿色为cloudcompare采集 四、qt软件上传到资源中
下载资源
PCL Harris关键点提取
文章目录 一、简介二、PCL中的Harris二、实现代码三、实现效果参考资料一、简介 Harris关键点检测于1988年Chair Harris和Mike Stephens提出,是早期非常经典的一种关键点检测算法。在二维图像中,Harris关键点检测通过计算图像点的Harris矩阵和矩阵对应的特征值来判断是否为关…
Qt5.9.4+VS2015 部署PCL1.8.1
0 编译环境所需软件包及版本Qt5.9.4msvc2015_64VS2015VTK 8.0.0 https://gitlab.kitware.com/vtk/vtk/tree/v8.0.0PCL1.8.1https://github.com/PointCloudLibrary/pcl/releases/tag/pcl-1.8.1PCL-1.8.1-AllInOne-msvc2015-win64cmake3.11.3 https://cmake.org/download/1 准备下…
ubuntu18.04下安装PCL
整体步骤可参考:https://blog.csdn.net/qq_42257666/article/details/124574029 在本人安装过程中,遇到一些问题,做几点说明:
1.在配置VTK的过程中报错如下: 解决方法:
sudo apt install libqt5x11extras…
点云数据处理常用外部库(C++/Windows)的项目配置
一、点云数据处理常用外部库(C版本)的下载安装与项目配置
(一)PCL 基于VS2019编程平台的PCL外部库下载安装及项目配置已有大量博客,本文不再赘述。具体下载安装及项目配置流程可参考外部库编译配置参考资料/*1*/ 。需…
windows安装pcl
文章目录 vcpkg方式安装默认安装x86默认没安装cloud_viewer.h AllInOne安装pcl的官方例程 vcpkg方式安装
官方建议在windows下,采用vcpkg的方式来安装: 安装vcpkg的,可以看这里:【WIN安装vcpkg】
默认安装x86
要注意的是 vcpkg…
PCL | Ubuntu18安装CloudCompare
文章目录 操作教程 操作教程
CloudCompare下载官网:https://www.danielgm.net/cc/release/
安装flatpak插件
sudo apt install flatpak添加库路径
flatpak remote-add flathub https://flathub.org/repo/flathub.flatpakrepo安装CC
flatpak install flathub or…
PCL点云处理之三点定圆 (二百三十二)
PCL点云处理之三点定圆 (二百三十二) 一、算法介绍二、算法实现一、算法介绍 二维平面,给定三个点,确定唯一圆的中心和半径参数。
二、算法实现
#include <iostream>
#include <cmath>struct Point
{
PCL 平面拟合——RANSAC
文章目录 一、基本思想二、代码示例1、参数选择2、核心代码3、完整代码4、结果展示三、关于 RANSAC 的一些思考参考文献一、基本思想
随机抽样一致性算法RANSAC(Random sample consensus)是一种迭代的方法,从一系列包含有离群值的数据中计算数学模型参数的方法。RANSAC算法本…
使用PCL进行ICP点云配准
下面代码的功能是:把一个文件夹中所有的pcd文件进行ICP点云配准,并且把每帧结果使用PCL的cloud_viewer进行显示。因为是在ROS下使用,所以还有一个ROS的发布操作(可忽略)。 源码如下:
#include <iostream>
#include <…
PCL 计算一个平面与包围盒体素的相交线
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 基于之前计算的包围盒体素(PCL 包围盒体素化显示),这里使用一个平面与其进行相交,并求出与其中体素单元的相交线。 二、实现代码
//标准文件
#include <iostream>
#include <thread>//PCL
C# 读取pcd点云文件数据
pcd文件有ascii 和二进制格式,ascii可以直接记事本打开,C#可以一行行读。但二进制格式的打开是乱码,如果尝试程序中读取,对比下看了数据也对不上。 这里可以使用pcl里的函数来读取pcd,无论二进制或ascii都可以正确读取…
WIN8.1 64位 +vs2012+PCL1.72安装
参考的是http://blog.csdn.net/otones/article/details/45138211,PCL的下载也在这个网址,它那个网盘包括PCL.props,最好默认安装C盘 win8.1 64位系统,vs2012也是64位的,依然要装32位的PCL,因为我们大部分用…
PCL 计算直线到三角形的距离(3D)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 这里的思路相对就简单很多了,主要有之前的积累: 1、首先,我们可以判断直线与三角形是否相交,相交则距离为0,这里可以参考之前的博客:PCL 计算一条射线与一个三角形的交点。 2、如果直线与三角形未相交,则只需…

EasyCloud软件简介
运行环境:Win10 PCL1.9 VTK8.1 Qt5.12 VS2017
基于PCL点云库的三维点云数据处理软件
1.软件用户界面
本软件的用户界面主要包括以下几个部分(如图1):
[1]菜单栏,将软件功能模块划分为不同菜单&…
PCL点云处理之重复随机采样一致性(RRANSAC法)平面拟合(二百三十七)
PCL点云处理之重复随机采样一致性(RRANSAC法)平面拟合(二百三十七) 一、算法介绍二、算法实现1.代码2.结果一、算法介绍
pcl::SAC_RRANSAC"是 PCL库中的一个方法,是 RANSAC 方法的改进版本,通过多次重复采样和模型拟合来提高鲁棒性。RRANSAC 的思想是在 RANSAC 的基…
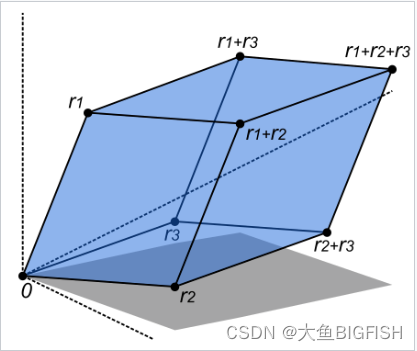
PCL 判断四点共面(三维空间)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 这里仍然沿用之前的方式来判断三维空间中四个顶点的共面性,三维空间中四个顶点可以构成三条线段(共用同一个顶点),这三条线段所代表的矢量可以组成一个立方空间,如下图所示: 这个立方体的体积其实就是由这三个…

3D视觉测量:形位公差 面对面垂直度(附源码)
文章目录 0. 测试效果1. 基本内容2. 实现方法2. 代码实现3. 参考文章目录:3D视觉测量目录微信:dhlddxB站: Non-Stop_0. 测试效果 1. 基本内容 垂直度用于描述被测要素相对基准(面/轴)的垂直(90)程度。是一个表面或轴线与一个基准面(通常是垂直于图纸纸面的一个面)之间的…
PCL 最小二乘法拟合平面(SVD)
文章目录 一、简介1.1最小二乘法拟合平面1.2 SVD角度二、实现代码三、实现效果参考资料一、简介
1.1最小二乘法拟合平面 之前我们使用过最为经典的方式对平面进行了最小二乘拟合(点云最小二乘法拟合平面),其推导过程如下所示: 仔细观察一下可以发现
Python点云处理(十八)点云地面点提取——基于法向量算法
目录 0 简述1 算法流程2 应用领域3 优缺点4 算法优化5 代码实现6 代码结果0 简述
基于法向量的点云地面点提取算法主要依靠点云中点的法向量信息来进行分类。地面点通常具有较平坦的表面,即法向量与垂直于地面的方向接近。因此,该算法首先计算每个点的法向量,然后通过判断法…
PCL 点到三角形的距离(3D)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 给定三角形ABC和点P,设Q为描述ABC上离P最近的点。求Q的一个方法:如果P在ABC内,那么P的正交投影点就是离P最近的点Q。如果P投影在ABC之外,最近的点则必须位于它的一条边上。在这种情况下,Q可以通过计算线段AB、…
PCL 点云的平面裁剪
目录 一、 算法概述二、代码示例三、输出结果一、 算法概述 适用:根据指定的box范围框来裁剪点云数据。(独创的思路,借用opencv内置的函数来实现点云数据在平面上的裁剪)。 二、代码示例
#include<iostream>
#include<pcl/point_cloud.h>
#include
PCL 包围盒体素化显示
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 这里实现一个很有趣的功能,虽然现阶段并没有法向这个功能有什么实际的作用,但是看起来很好看(可视化)。思路也是很简单,就是将点云和Mesh的包围盒进行等分,分割之后就会成为一个一个小格子(小包围盒),这里…
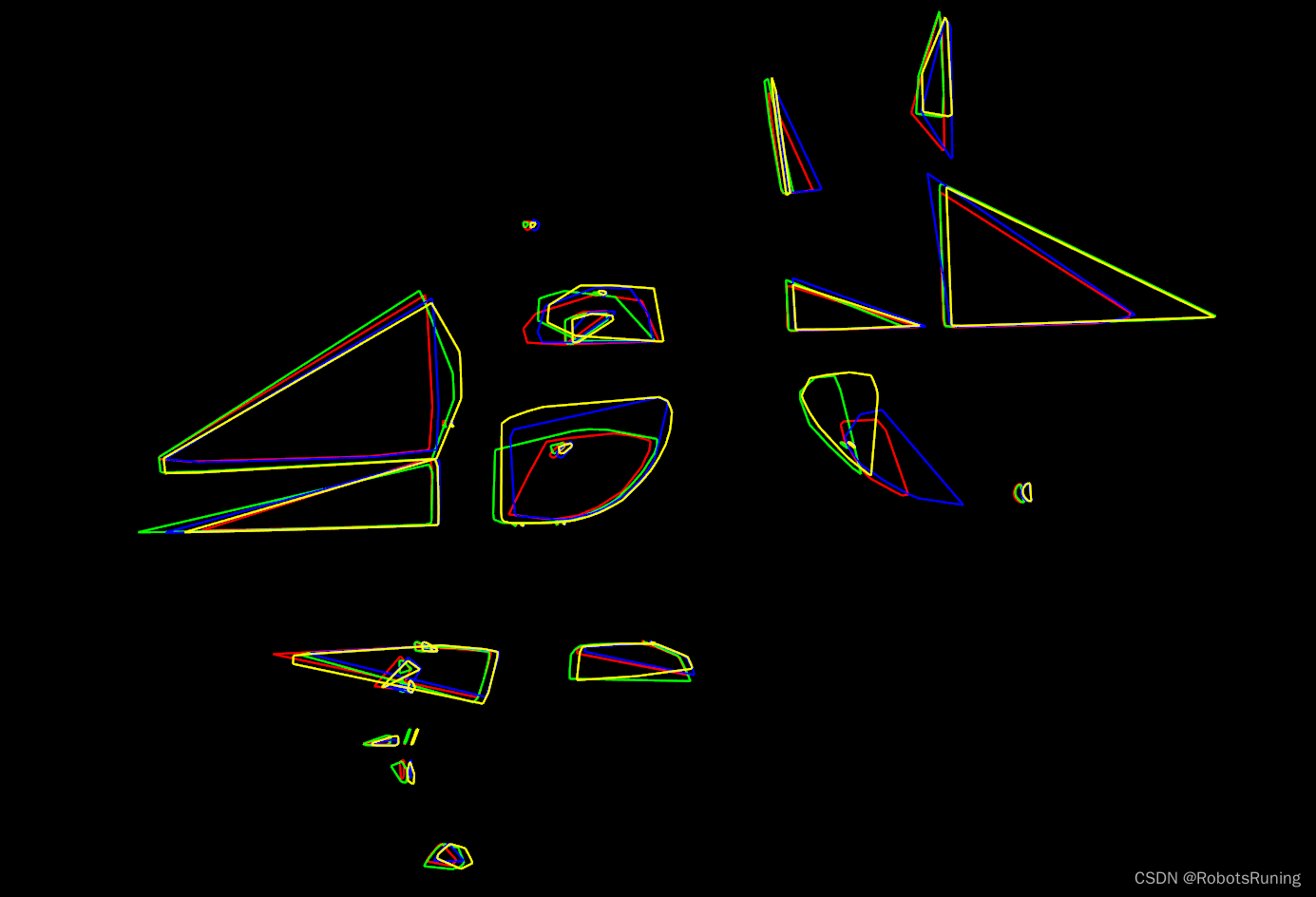
同时显示上下两层凸包特征的可视化程序
数据类型
std::vector<pcl::PointCloud<pcl::PointXYZ>::Ptr> hulls_k_upper
std::vector<pcl::PointCloud<pcl::PointXYZ>::Ptr> hulls_k_lower
std::vector<pcl::PointCloud<pcl::PointXYZ>::Ptr> hulls_underk_upper
std::vector<…
C++结合PCL库实现曲率降采样
// DownSampleOptimizer.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。 //
#include <iostream> #include <pcl/io/pcd_io.h> #include "down_sample_optimizer.h" #include <pcl/point_cloud.h> #include <pcl/poi…
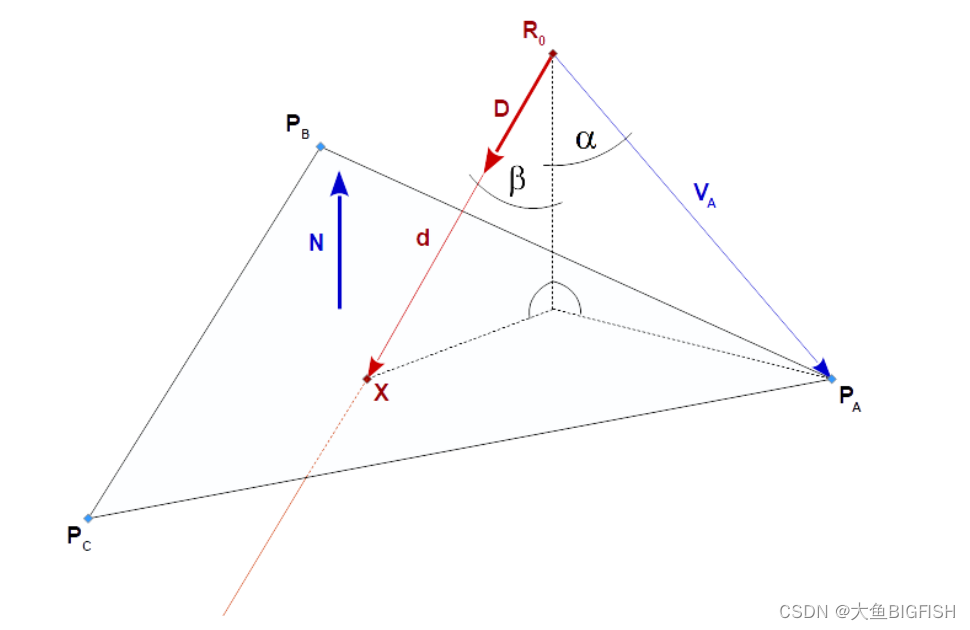
PCL 计算一条射线与一个三角形的交点
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 这里我们使用点向式分别表示一个射线与一个三角形,如下图所示: 其中,平面的法向量 N N N可以由三角形两条边的叉乘来计算,点R0到平面的法向距离
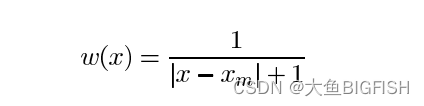
CeresPCL 加权四阶多项式曲线拟合
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 仍然延续之前的拟合思路Ceres&PCL 曲线拟合之三阶多项式(二),有时候我们的确需要一些更高阶的函数更为灵活的去拟合数据,因此这里也实现了一种使用四阶多项式曲线来拟合数据的方式,这里我们仍然使用之前的…
C# 读取pcd、ply点云文件数据
最近研究了下用pcl读取点云数据,又做了个C#的dll,方便读取,同样这个dll基于pcl 最新版本1.13.1版本开发。 上次做的需要先得到点云长度,再获取数据。这次这个定义了一个PointCloudXYZ类来存数据。将下面的dll拷贝到可执行目录下&a…
CeresPCL 曲线拟合之三次多项式
文章目录 一、简介2.1 实现步骤二、实现代码三、实现效果参考资料一、简介
2.1 实现步骤 (1)构建代价函数。假设我们得到了一组数据,也知晓该数据是用曲线方程: y = a x 3 + b x 2 + c x +
【PCL】(十)使用StatisticalOutlierRemove滤波器除去异常点
(十)使用StatisticalOutlierRemove滤波器删除异常点
以下代码实现使用StatisticalOutlierRemove去去除点云的异常点。 statistical_removal.cpp
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#inc…
ubuntu 下pcl1.8的安装与测试
已经安装过pcl多次,记录下。 !!!!一定注意,安装时候,要把anconda的环境变量去掉 !!!! 重要的事情说三遍!! !&a…

【python pcl】Windows 10 python pcl 安装与测试
windows 10 python pcl 安装与测试,python_pcl,亲测可用,含python pcl点云读取与可视化代码及测试效果。
1 安装vs2017 请参考网络其他教程。也可以安装vs2015,在下载pcl-1.8.1时下载安装对应的版本即可,方法完全相同…
QT中使用QVTKOpenGLNativeWidget的简单教程以及案例,利用PCLVisualizer显示点云
先添加一个带有ui的QT应用程序。
一、在ui界面中添加QVTKOpenGLNativeWidget控件
先拖出来一个QOpenGLWidget控件 修改布局如下: 然后将QOpenGLWidget控件提升为QVTKOpenGLNativeWidget控件,步骤如下:
右击QOpenGLWidget窗口,选…

windows环境使用cmake配置pcl
安装环境 cmake版本:cmake-3.26.3-windows-x86_64 pcl版本:PCL 1.13.1 vs版本:vs2022
配置流程
cmake编译准备:新建两个文件夹source和cmake_bin。source用于存放.cpp文件和CMakeLists.txt 文件;cmake_bin存放配置生…
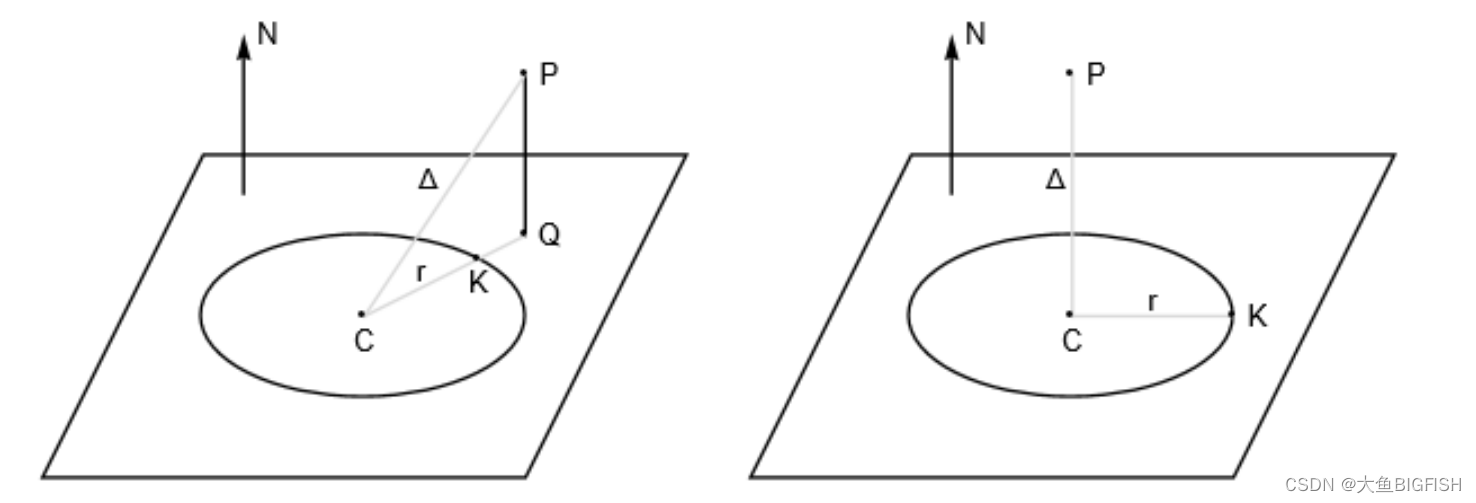
PCL 计算点与圆的距离(3D)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 3D中的圆可以有圆心、半径以及法线来进行表示,如下图所示: 这里我们假设: Δ = P − C \Delta=P-C Δ
